3 feldorientierte regelung, Extended mode – BECKHOFF EL7037 Benutzerhandbuch
Seite 24
Produktübersicht
2.3.3
Feldorientierte Regelung
In den Extended Operation Modes wird der Schrittmotor wie ein Servomotor nach dem Prinzip der
Feldorientierten Regelung betrieben.
Funktion
Das Betriebsverhalten des Motors entspricht dabei dem Verhalten eines traditionellen Gleichstrommotors,
bei dem die Kommutierung über einen mechanischen Kommutator erfolgt. Das Drehmoment der
Gleichstrommaschine ist bei konstantem Erregerfeld direkt proportional zum Statorstrom und kann über
diesen direkt beeinflusst werden. Das Erregerfeld wird je nach Maschinentyp durch Permanentmagnete oder
z.B. bei einer fremderregten Gleichstrommaschine über eine separate Erregerwicklung erzeugt.
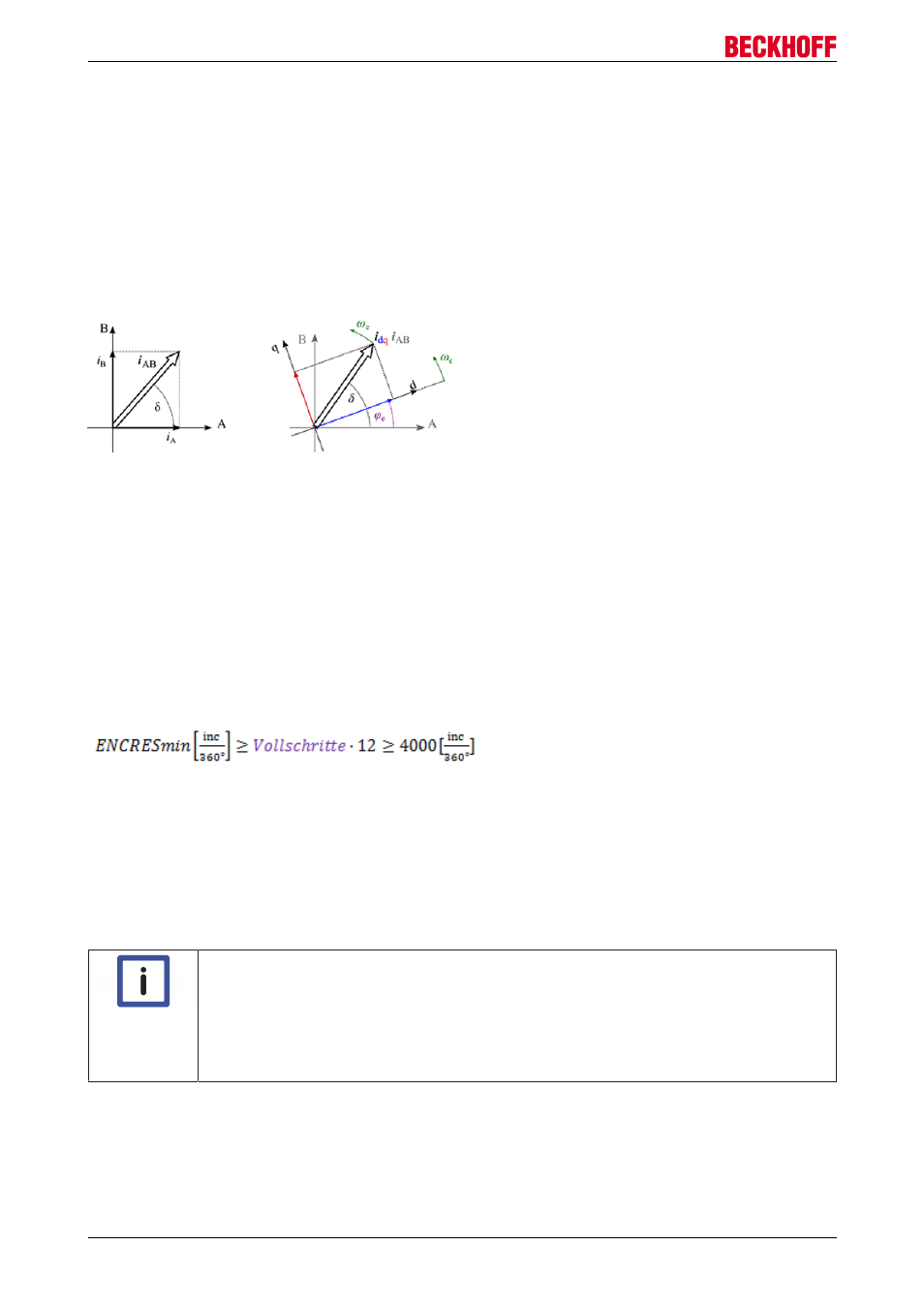
Abb. 13: Koordinatentransformation der Feldorientierten Regelung
Bei Servomotoren und auch beim Hybridschrittmotor besteht zunächst kein direkter Zusammenhang
zwischen den Phasenströmen und dem Drehmoment. Die Entkopplung von Feld und Drehmoment wird über
die so genannte Park-Transformation mathematisch vorgenommen. Dabei werden aus den Phasenströmen
zwei Stromkomponenten, „d“, für „direkt“ in Feldrichtung und „q“ für „quadratur“ in drehmomentbildender
Richtung, berechnet. Über die drehmomentbildende Stromkomponente i
q
kann das Drehmoment der
Maschine nun wie bei der Gleichstrommaschine direkt geregelt werden.
Voraussetzung ist, dass die Position des Rotors in ausreichend hoher Genauigkeit zur Verfügung steht.
Beim Schrittmotor sollte die Encoderauflösung, um eine ausreichende Positioniergenauigkeit zu erreichen,
mindestens 4000 Incremente pro einer mechanischen Umdrehung betragen. Weiterhin ist die
Mindestauflösung des Encoders von der Anzahl der Vollschritte abhängig und kann näherungsweise wie
folgt berechnet werden.
Abb. 14: Berechnung der Auflösung
Kommutierungsfindung für Extended Operation Modes
Da die Istposition bei Inkrementalencodern nicht absolut vorliegt, besteht beim Systemstart kein direkter
Bezug zur Position des Rotors, der für den feldorientierten Betrieb erforderlich ist. Der Bezug der Istposition
zur Rotorposition muss daher beim Systemstart über eine Kommutierungsfindung hergestellt werden.
Während dieses Vorgangs wird der Rotor mehrfach um bis zu zwei Vollschritte vor und zurück bewegt.
Hinweis
Kommutierungsfindung
• Der Maximalstrom „Maximal Current“ sollte nicht wesentlich unterhalb des Motornenn-
stromes eingestellt sein.
• Während der Kommutierungsfindung darf die Rotorwelle nicht von außen durch ein
Drehmoment belastet werden. Ist diese Bedingung nicht erfüllt, so können die Exten-
ded Operation Modes nicht verwendet werden.
Regelstruktur
Die Antriebsregelstruktur ist eine Kaskadenregelstruktur mit einem Positionsregelkreis mit unterlagertem
Drehzahl- und Stromregelkreis. Bei Vorgabe eines Drehzahlsollwertes kann der äußere Positionsregelkreis
entfallen.
EL70x7
24
Version 1.0