7 grundlagen zum "positioning interface, Grundlagen zum "positioning interface – BECKHOFF EL7037 Benutzerhandbuch
Seite 143
Inbetriebnahme
Abb. 162: Eingabe der Geschwindigkeit
• Die Umschaltung zum sensorlosen Betrieb erfolgt über parametrierbare, motorabhängige
Umschaltdrehzahl. Die Umschaltdrehzahl liegt meist im Bereich von einer halben bis drei
Umdrehungen pro Sekunde (Crossover velocity 1, Index 8014:07 [
185]). Und anschließend ein
Hinweis mit:
Hinweis
Parametrierung Sensorloser Betrieb
Alle Parameter, die für den Sensorlosen Betrieb erforderlich sind, können zusammenge-
fasst der Tabelle „Übersicht der Parametereinstellungen einzelner Betriebsarten [
126]“
entnommen werden.
Alle notwendigen Parameter sind jedoch für die endsprechenden Motortypen über eine
StartupListe vorparametriert.
5.4.7
Grundlagen zum "Positioning interface"
Das "Positioning interface" bietet dem Anwender eine Möglichkeit direkt auf der Klemme Fahraufträge
auszuführen.
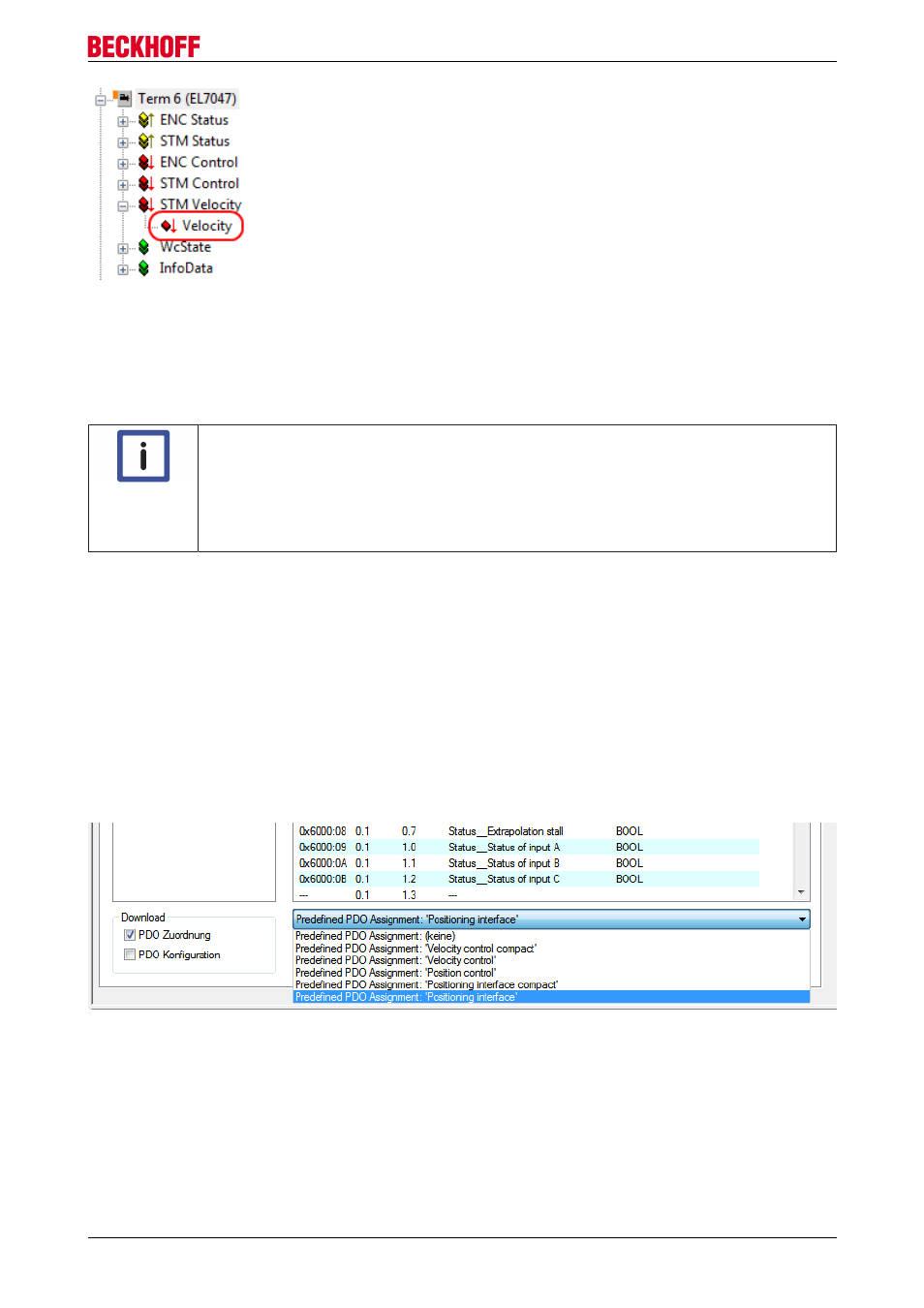
Predefined PDO Assignment
Eine vereinfachte Auswahl der Prozessdaten ermöglicht das "Predefined PDO Assignment [
107]". Am
unteren Teil des Prozessdatenreiters wählen Sie die Funktion "Positioning interface" oder "Positioning
interface compact" aus. Es werden dadurch alle benötigten PDOs automatisch aktiviert, bzw. die nicht
benötigten deaktiviert.
Abb. 163: Predefined PDO Assignment
Parametersatz
186]) und die "POS Features" (Index 8021 [
187]).
EL70x7
143
Version 1.0