Informations-/diagnosedaten (kanalspezifisch), Konfiguration mit dem twincat system manager – BECKHOFF EL7037 Benutzerhandbuch
Seite 190
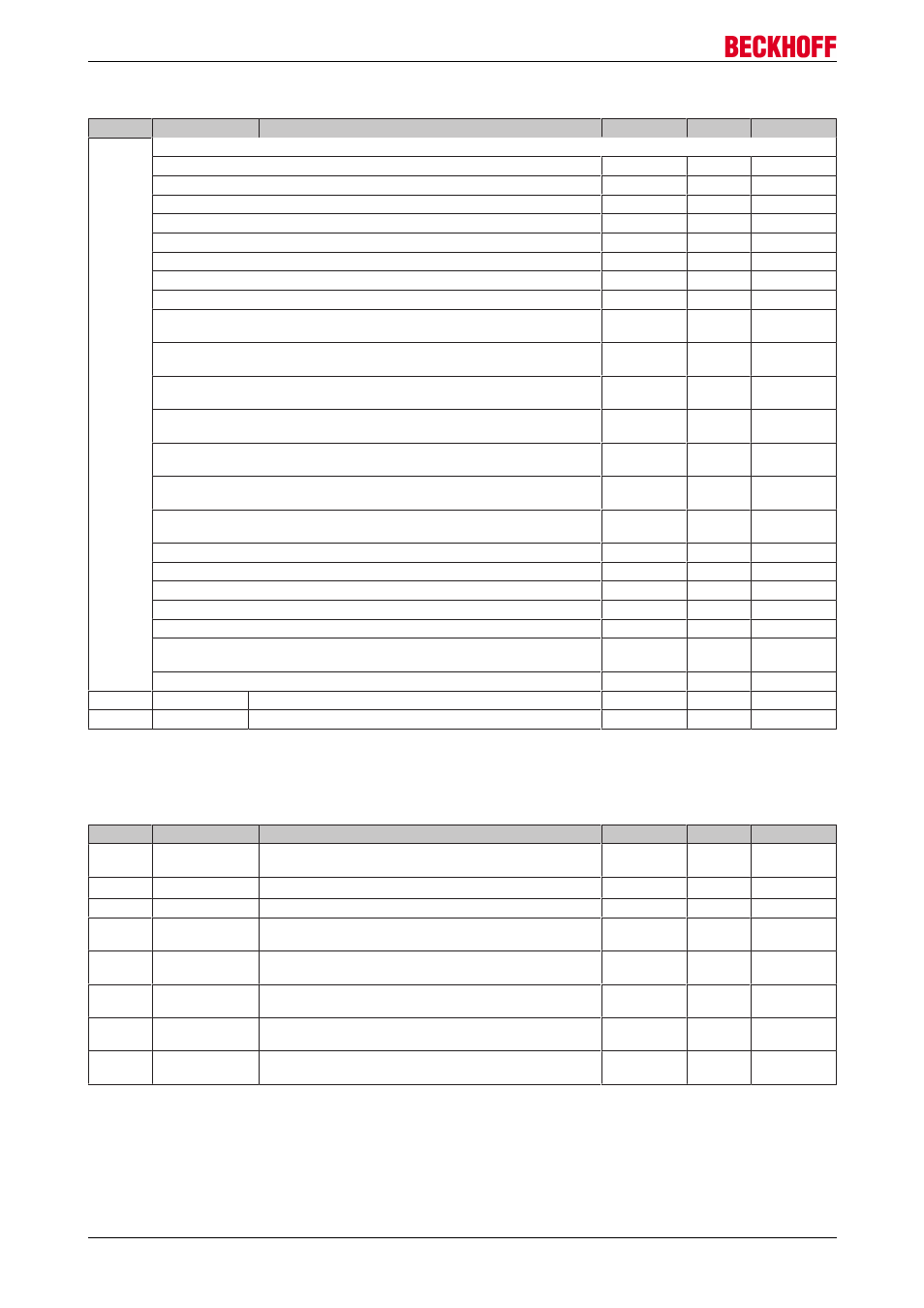
Konfiguration mit dem TwinCAT System Manager
Index 7020 POS Outputs Ch.1 (Teil 2)
Index
Name
Bedeutung
Datentyp
Flags
Default
7020:22
Start type
0x0000 Idle: es wird kein Fahrauftrag ausgeführt
UINT16
RO
0x0000 (0
dez
)
0x0001 Absolute: Zielposition absolut
UINT16
RO
0x0000 (0
dez
)
0x1001 Absolute (Change): Änderung während eines aktiven Fahrauftrages
UINT16
RO
0x0000 (0
dez
)
0x0002 Relative: Zielposition relativ von der aktuellen Position aus
UINT16
RO
0x0000 (0
dez
)
0x1002 Relative (Change): Änderung während eines aktiven Fahrauftrages
UINT16
RO
0x0000 (0
dez
)
0x0003 Endless plus: Endlosfahrt in positiver Drehrichtung
UINT16
RO
0x0000 (0
dez
)
0x0004 Endless minus: Endlosfahrt in negativer Drehrichtung
UINT16
RO
0x0000 (0
dez
)
0x0105 Modulo short: kürzeste Entfernung zur nächsten Moduloposition
UINT16
RO
0x0000 (0
dez
)
0x0115 Modulo short extended: kürzeste Entfernung zur nächsten Modulopositi-
on (ohne Modulofenster)
UINT16
RO
0x0000 (0
dez
)
0x0205 Modulo plus: Fahrt in positiver Drehrichtung zur nächsten Modulopositi-
on
UINT16
RO
0x0000 (0
dez
)
0x0215 Modulo plus extended: Fahrt in positiver Drehrichtung zur nächsten Mo-
duloposition (ohne Modulofenster)
UINT16
RO
0x0000 (0
dez
)
0x0305 Modulo minus: Fahrt in negativer Drehrichtung zur nächsten Modulopo-
sition
UINT16
RO
0x0000 (0
dez
)
0x0315 Modulo minus extended: Fahrt in negativer Drehrichtung zur nächsten
Moduloposition (ohne Modulofenster)
UINT16
RO
0x0000 (0
dez
)
0x0405 Modulo current: Fahrt in die letzte ausgeführte Drehrichtung zur nächs-
ten Moduloposition
UINT16
RO
0x0000 (0
dez
)
0x0415 Modulo current extended: Fahrt in die letzte ausgeführte Drehrichtung
zur nächsten Moduloposition (ohne Modulofenster)
UINT16
RO
0x0000 (0
dez
)
0x0006 Additive: neue Zielposition relativ / additiv zur letzten Zielposition
UINT16
RO
0x0000 (0
dez
)
0x1006 Additive (Change): Änderung während eines aktiven Fahrauftrages
UINT16
RO
0x0000 (0
dez
)
0x6000 Calibration, PLC cam: Kalibrierung mit Nocke
UINT16
RO
0x0000 (0
dez
)
0x6100 Calibration, HW sync: Kalibrierung mit Nocke und C-Spur
UINT16
RO
0x0000 (0
dez
)
0x6E00 Calibration, set manual: Kalibrierung manuell setzen
UINT16
RO
0x0000 (0
dez
)
0x6E01 Calibration, set manual auto: Kalibrierung autom. setzen, bei "Enable =
1"
UINT16
RO
0x0000 (0
dez
)
0x6F00 Calibration, clear manual: Kalibrierung manuell löschen
UINT16
RO
0x0000 (0
dez
)
7020:23
Acceleration
Vorgabe der Beschleunigung
UINT16
RO
0x0000 (0
dez
)
7020:24
Deceleration
Vorgabe der Verzögerung
UINT16
RO
0x0000 (0
dez
)
Informations-/Diagnosedaten (kanalspezifisch)
Index 9010 STM Info data Ch.1
Index
Name
Bedeutung
Datentyp
Flags
Default
9010:0
STM Info data
Ch.1
Maximaler Subindex
UINT8
RO
0x13 (19
dez
)
9010:01
Status word
Statuswort (siehe Index A010 [
UINT16
RO
0x0000 (0
dez
)
9010:08
Motor velocity
aktuelle Motorgeschwindigkeit
INT16
RO
0x0000 (0
dez
)
9010:09
Internal position
interne Position (Mikro-Inkremente)
UINT32
RO
0x00000000
(0
dez
)
9010:0B
Motor load
aktuelle Belastung des Motors
Einheit : 0,01°
INT16
RO
0x0000 (0
dez
)
9010:0D
Motor dc current
aktueller Motorstrom (DC-Vektor)
Einheit : 1 mA
INT16
RO
0x0000 (0
dez
)
9010:0E
Tn (curr.)
intern berechnete Zeitkonstante des Stromreglers
Einheit : 0,01 ms
UINT16
RO
0x0000 (0
dez
)
9010:13
External position
externe Position (angeschlossener Enkoder)
UINT32
RO
0x00000000
(0
dez
)
EL70x7
190
Version 1.0