Index a010 stm diag data ch.1, Konfiguration mit dem twincat system manager – BECKHOFF EL7037 Benutzerhandbuch
Seite 191
Konfiguration mit dem TwinCAT System Manager
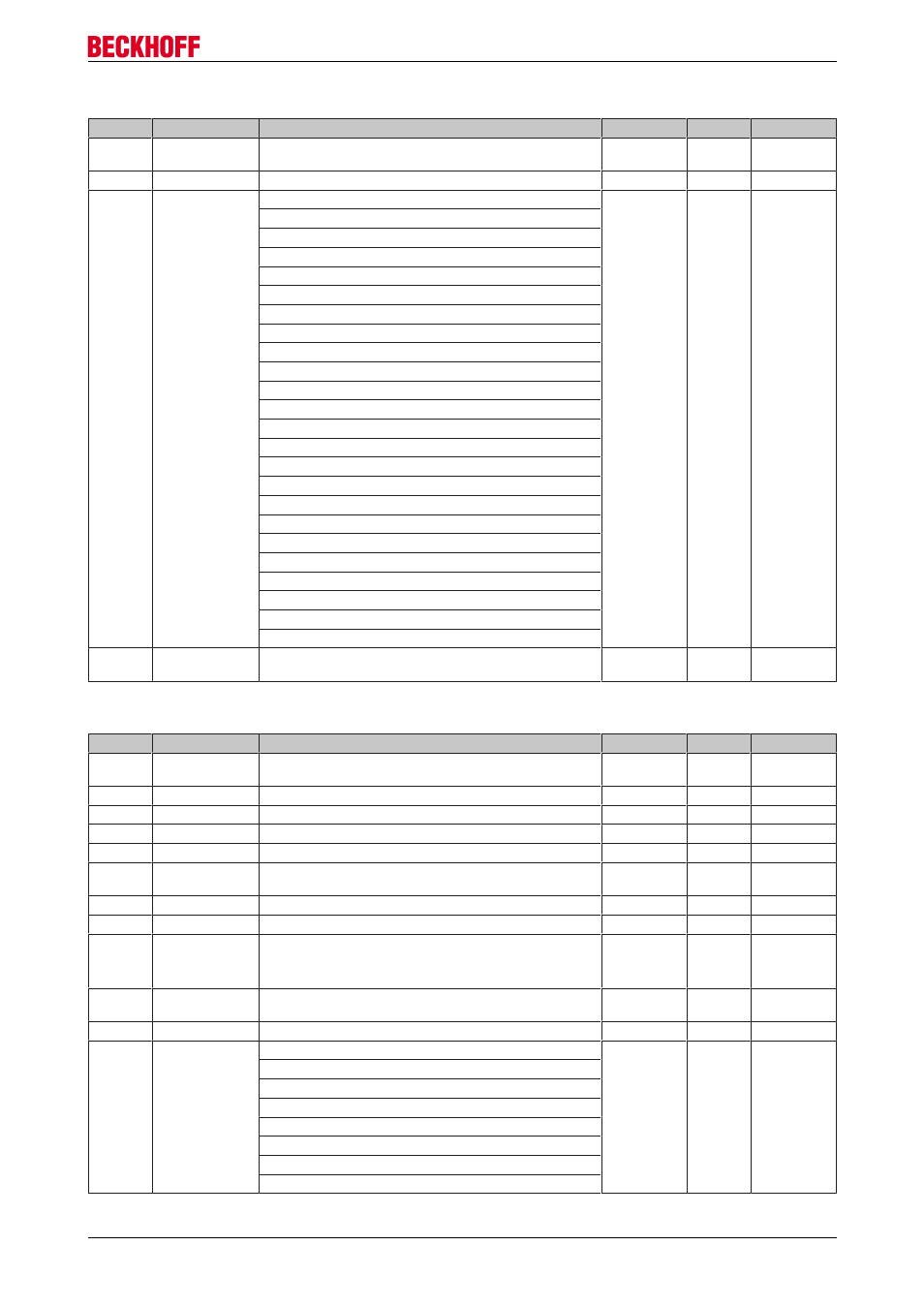
Index 9020 POS Info data Ch.1
Index
Name
Bedeutung
Datentyp
Flags
Default
9020:0
POS Info data
Ch.1
Maximaler Subindex
UINT8
RO
0x04 (4
dez
)
9020:01
Status word
Statuswort
UINT16
RO
0x0000 (0
dez
)
9020:03
State (drive con-
troller)
erlaubte Werte:
UINT16
RO
0x0000 (0
dez
)
0: Init
1: Idle
272: Go cam
273: On cam
16: Start
17: Acceleration
18: Constant
19: Decelleration
288: Go sync impulse
289: Leave cam
4096: Pre target
4097: In target
32: Emergency stop
33: Normal stop
304: Calibration stop
8192: Drive end
8193: Wait for init
320: Is calibrated
321: Not calibrated
16384: Drive warning
32768: Error
65535: Undefined
256: Calibration start
9020:04
Actual position lag aktueller Schrittfehler
INT32
RO
0x00000000
(0
dez
)
Index A010 STM Diag data Ch.1
Index
Name
Bedeutung
Datentyp
Flags
Default
A010:0
STM Diag data
Ch.1
Maximaler Subindex
UINT8
RO
0x11 (17
dez
)
A010:01
Saturated
Treiberstufe arbeitet mit maximalem Duty-Cycle
BOOLEAN
RO
0x00 (0
dez
)
A010:02
Over temperature Innentemperatur der Klemme ist größer als 80 °C
BOOLEAN
RO
0x00 (0
dez
)
A010:03
Torque overload
DutyCycle-Ausgabe bei 100%
BOOLEAN
RO
0x00 (0
dez
)
A010:04
Under voltage
Versorgungsspannung kleiner als 7 V
BOOLEAN
RO
0x00 (0
dez
)
A010:05
Over voltage
Versorgungsspannung 10% größer, als die Nennspannung
(siehe 8010:03)
BOOLEAN
RO
0x00 (0
dez
)
A010:06
Short circuit
Kurzschluss einer Motorspule
BOOLEAN
RO
0x00 (0
dez
)
A010:08
No control power
Treiberstufe ohne Spannungsversorgung
BOOLEAN
RO
0x00 (0
dez
)
A010:09
Misc error
• Initialisierung fehlgeschlagen oder
• Innentemperatur der Klemme ist größer als 100 °C
(siehe F80F:05)
BOOLEAN
RO
0x00 (0
dez
)
A010:0A
Configuration
CoE-Änderung wurde noch nicht in aktueller Konfiguration
übernommen
BOOLEAN
RO
0x00 (0
dez
)
A010:0B
Motor stall
ein Schrittverlust ist aufgetreten
BOOLEAN
RO
0x00 (0
dez
)
A010:11
Actual operation
mode
erlaubte Werte:
BIT4
RO
0x00 (0
dez
)
0: Automatic
1: Velocity direct
2: Velocity controller
3: Position controller
4: Ext. Velocity mode
5: Ext. Position mode
6: Velocity sensorless
EL70x7
191
Version 1.0