Konfiguration mit dem twincat system manager – BECKHOFF EL7037 Benutzerhandbuch
Seite 162
Konfiguration mit dem TwinCAT System Manager
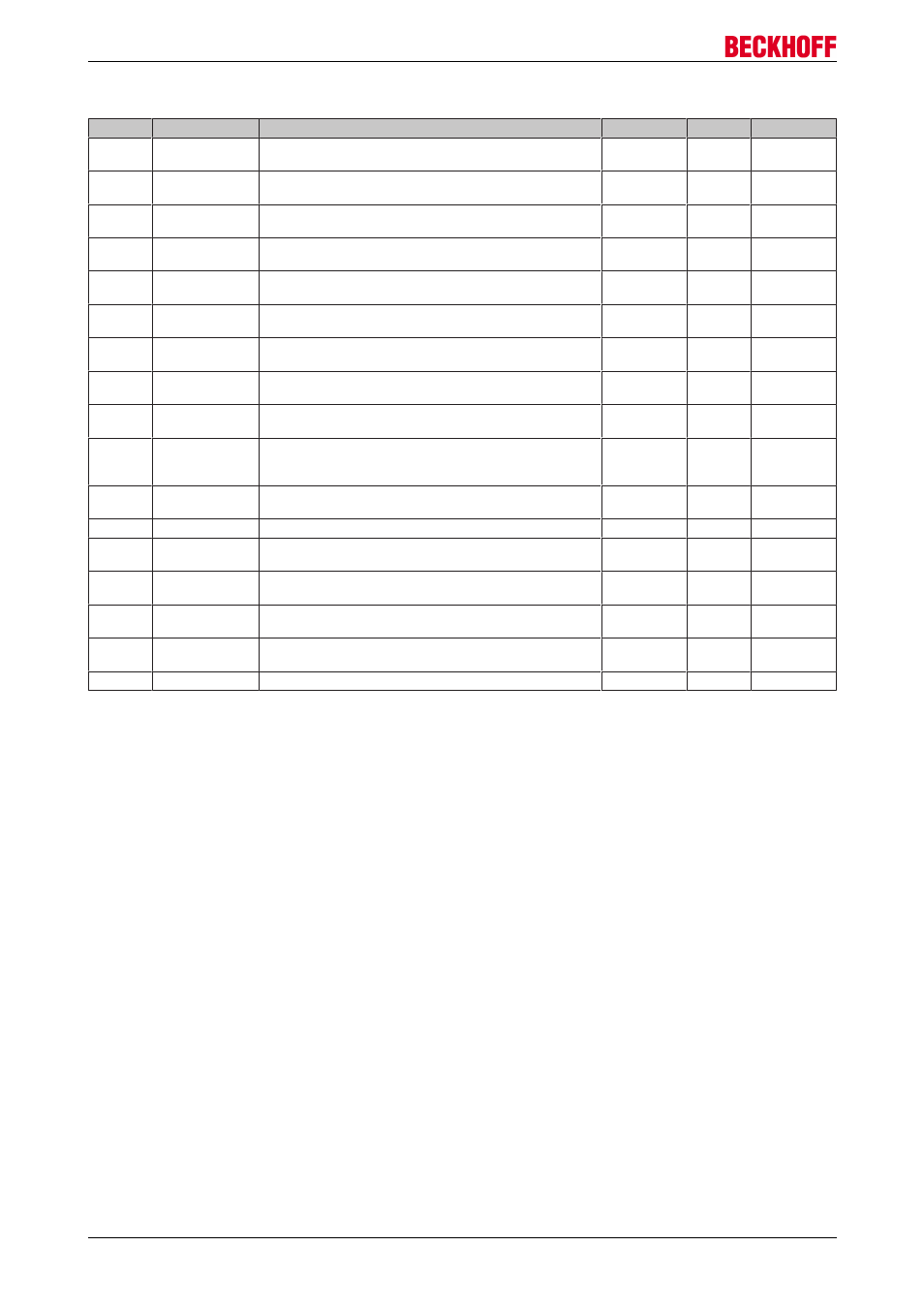
Index 8020 POS Settings Ch.1
Index
Name
Bedeutung
Datentyp
Flags
Default
8020:0
POS Settings
Ch.1
Maximaler Subindex
UINT8
RO
0x10 (16
dez
)
8020:01
Velocity min.
minimale Sollgeschwindigkeit (Bereich: 0-10000)
INT16
RW
0x0064
(100
dez
)
8020:02
Velocity max.
maximale Sollgeschwindigkeit (Bereich: 0-10000)
INT16
RW
0x2710
(10000
dez
)
8020:03
Acceleration pos. Beschleunigung in positiver Drehrichtung
Einheit : 1 ms
UINT16
RW
0x03E8
(1000
dez
)
8020:04
Acceleration neg. Beschleunigung in negativer Drehrichtung
Einheit : 1 ms
UINT16
RW
0x03E8
(1000
dez
)
8020:05
Deceleration pos. Verzögerung in positiver Drehrichtung
Einheit : 1 ms
UINT16
RW
0x03E8
(1000
dez
)
8020:06
Deceleration neg. Verzögerung in negativer Drehrichtung
Einheit : 1 ms
UINT16
RW
0x03E8
(1000
dez
)
8020:07
Emergency dece-
leration
Notfallverzögerung (beide Drehrichtungen)
Einheit : 1 ms
UINT16
RW
0x0064
(100
dez
)
8020:08
Calibration positi-
on
Kalibrierposition
UINT32
RW
0x00000000
(0
dez
)
8020:09
Calibration veloci-
ty (towards plc
cam)
Kalibriergeschwindigkeit auf die Nocke (Bereich: 0-10000)
INT16
RW
0x0064
(100
dez
)
8020:0A
Calibration Veloci-
ty (off plc cam)
Kalibriergeschwindigkeit von der Nocke herunter (Bereich:
0-10000)
INT16
RW
0x000A (10
dez
)
8020:0B
Target window
Zielfenster
UINT16
RW
0x000A (10
dez
)
8020:0C
In-Target timeout
Zielpositions-Timeout
Einheit : 1 ms
UINT16
RW
0x03E8
(1000
dez
)
8020:0D
Dead time com-
pensation
Totzeitkompensation
Einheit : 1 µs
INT16
RW
0x0032 (50
dez
)
8020:0E
Modulo factor
Modulofaktor/-position
UINT32
RW
0x00000000
(0
dez
)
8020:0F
Modulo tolerance
window
Toleranzfenster für Modulopositionierung
UINT32
RW
0x00000000
(0
dez
)
8020:10
Position lag max.
maximal erlaubter Schrittfehler
UINT16
RW
0x0000 (0
dez
)
EL70x7
162
Version 1.0