Standard ext, Calibration – BECKHOFF EL7037 Benutzerhandbuch
Seite 151
Inbetriebnahme
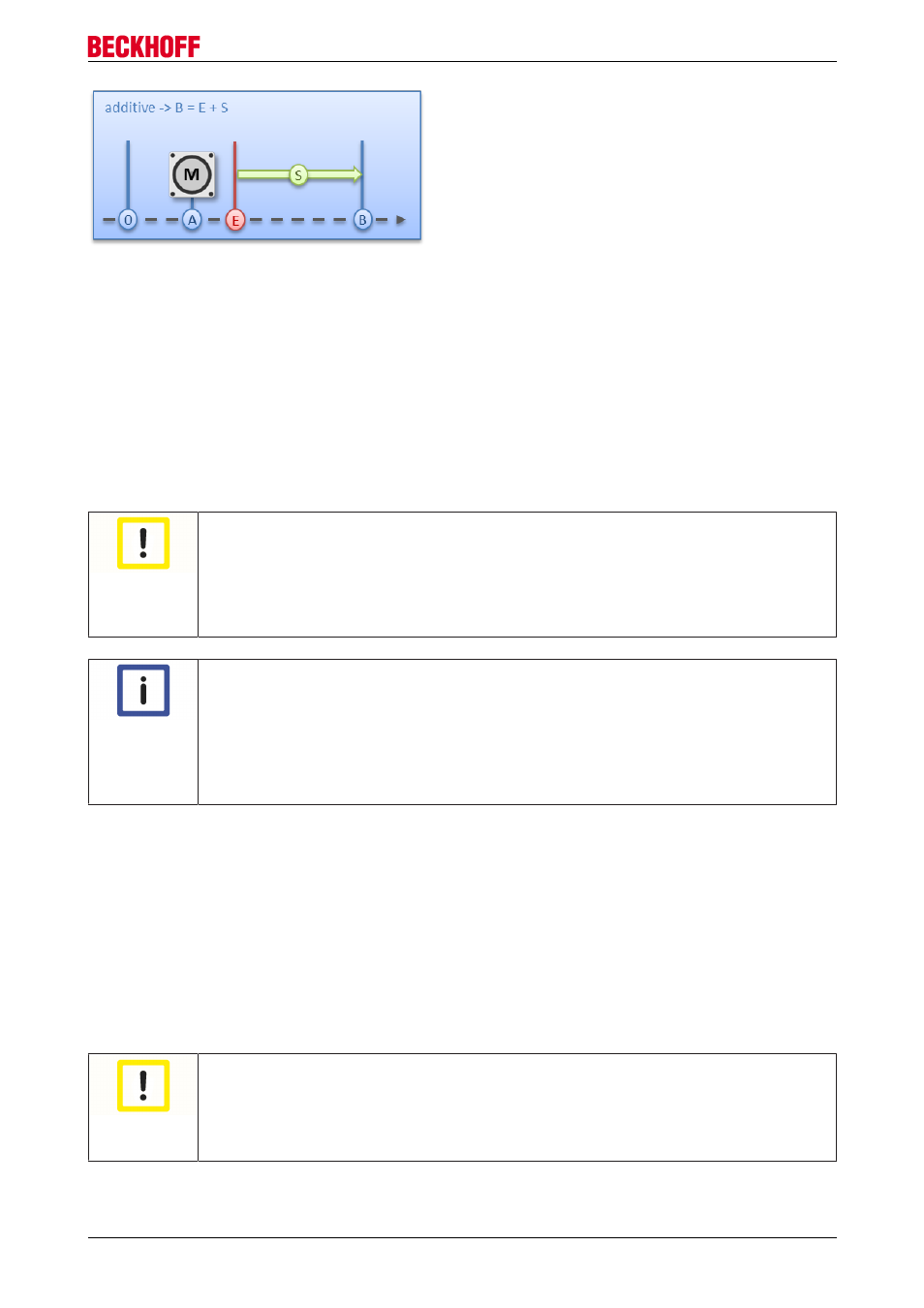
Abb. 170: Additive Positionierung
ABSOLUTE_CHANGE / RELATIVE_CHANGE / ADDITIVE_CHANGE:
Diese drei Positionierarten sind komplett identisch zu den oben beschrieben. Der wichtige Unterschied dabei
ist, dass der Anwender während eines aktiven Fahrauftrags diese Kommandos nutzt, um dynamisch eine
neue Zielposition vorzugeben.
Es gelten dabei die gleichen Regeln und Voraussetzungen, wie bei den "normalen" Starttypen.
"ABSOLUTE_CHANGE" und "ADDITIVE_CHANGE" sind in der Berechnung der Zielposition eindeutig d.h.
bei der absoluten Positionierung wird eine absolute Position vergegeben und bei der additiven
Positionierung wird ein Positionsdelta zu der gerade aktiven Zielposition addiert.
Achtung
Vorsicht bei der Verwendung der Positionierung "RELATIVE_CHANGE"
Die Änderung per "RELATIVE_CHANGE" muss mit Vorsicht angewendet werden, da auch
hier die aktuelle Position des Motors als Startposition verwendet wird. Durch Laufzeiten des
Systems stimmt die im PDO angezeigte Position nie mit der realen Position des Motors
überein! Daher wird sich bei der Berechnung des übergebenen Positionsdeltas immer eine
Differenz zur gewünschten Zielposition einstellen.
Hinweis
Zeitpunkt der Änderung der Zielposition
Eine Änderung der Zielposition kann nicht zu jedem beliebigen Zeitpunkt erfolgen. Falls die
Berechnung der Ausgabeparameter ergibt, dass die neue Zielposition nicht ohne weiteres
erreicht werden kann, wird das Kommando von der Klemme abgewiesen und das Bit
"Command rejected [
146]" gesetzt. Dies ist z.B. im Stillstand (da die Klemme hier eine
Standard Positionierung erwartet) und in der Beschleunigungsphase (da zu diesem Zeit-
punkt der Bremszeitpunkt noch nicht berechnet werden kann) der Fall.
CALI_PLC_CAM / CALI_HW_SYNC / SET_CALIBRATION /
SET_CALIBRATION_AUTO / CLEAR_CALIBRATION:
Der einfachste Fall einer Kalibrierung ist der, nur per Nocke (an einem dig. Eingang angeschlossen) zu
kalibrieren.
Hier bei fährt der Motor im 1. Schritt mit der Geschwindigkeit 1 (Index 8020:09 [
187]) auf die Nocke. Anschließend im 2. Schritt mit der Geschwindigkeit 2 (Index 8020:0A [
in Richtung 2 (Index 8021:14 [
187]) von der Nocke herunter. Nachdem das "In-Target timeout" (Index
186]) abgelaufen ist wird die Kalibrierposition (Index 8020:08 [
186]) als aktuelle Position von der
Klemme übernommen.
Achtung
Schalthysterese des Nockenschalters beachten
Bei dieser einfachen Kalibrierung muss beachtet werden, dass die Positionserfassung der
Nocke nur bedingt genau ist. Die digitalen Eingänge sind nicht interruptgesteuert und wer-
den "nur" gepollt. Durch die internen Laufzeiten kann sich deshalb eine systembedingte
Positionsdifferenz ergeben.
EL70x7
151
Version 1.0