HEIDENHAIN TNC 407 (243 020) Technical Manual Benutzerhandbuch
Seite 200
➀ Beim Betrieb mit Geschwindigkeits-Vorsteuerung wird der Geschwindigkeits-Sollwert (die
Analogspannung zum Antriebverstärker) aus drei Komponenten gebildet:
Geschwindigkeits-Vorsteuerung,
Schleppabstand,
Integralanteil.
➁ Die Geschwindigkeits-Vorgabe, die über Maschinen-Parameter an die dynamischen
Eigenschaften der Maschinen angepaßt wird, bewirkt, daß mit einem Schleppabstand nahe "0"
geregelt werden kann.
➂ Schwankungen um den Positions-Istwert werden, wie beim "Betrieb mit Schleppabstand"
beschrieben, ausgeglichen. Es wird um die vorgesteuerte Kurve geregelt. Hierbei wirkt dann
der k
v
-Faktor für die Geschwindigkeits-Vorsteuerung.
➃ Bei stillstehenden Achsen wird zusätzlich der Integralfaktor wirksam: er bewirkt einen Offset-
Abgleich.
MP1390
Geschwindigkeits-Vorsteuerung in den Betriebsarten „Positionieren mit
Handeingabe“, „Programmlauf Einzelsatz“ und „Programmlauf Satzfolge“
Eingabe: 0 oder 1
0 = Betrieb mit Geschwindigkeits-Vorsteuerung
1 = Betrieb mit Schleppabstand
MP1391
Geschwindigkeits-Vorsteuerung in den Betriebsarten „Manuell“ und „Handrad“
Eingabe: %xxxxx
Bit 0
Achse X
0 =
Betrieb mit Schleppabstand
Bit 1
Achse Y
1 =
Betrieb mit Geschwindigkeits-Vorsteuerung
Bit 2
Achse Z
Bit 3
Achse 4
Bit 4
Achse 5
Die Geschwindigkeits-Vorgabe wird über zwei Maschinen-Parameter an die Dynamik der
Maschine angepaßt.
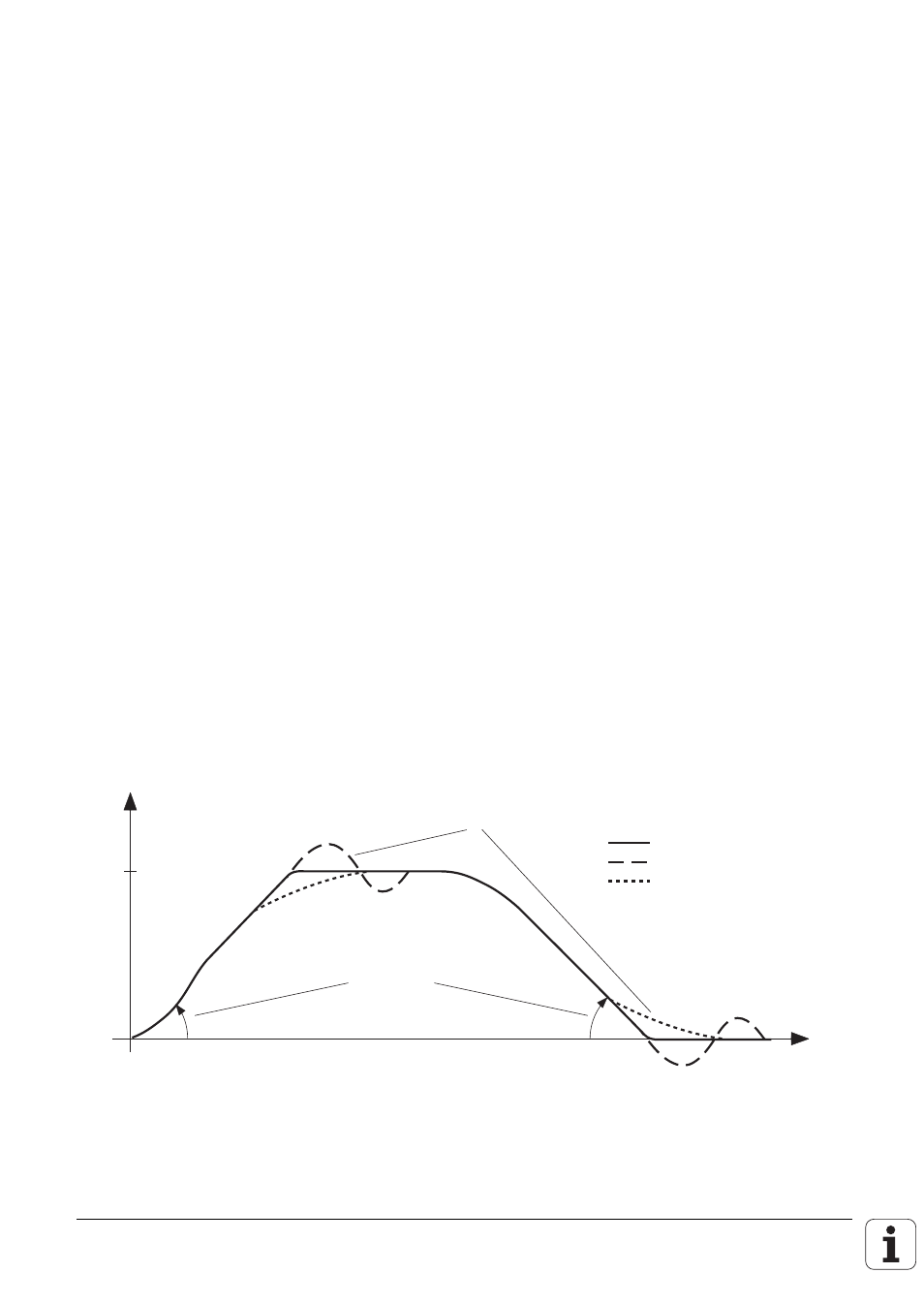
U [V]
t [ms]
MP1060
MP1520
Vorsteuerung
Eingabewert richtig
Eingabewert zu groß
Eingabewert zu klein
9
Maschine-Parameter MP1060 bestimmt die Beschleunigung (=Steilheit der vorgesteuerten
Geschwindigkeitskurve).
MP1520 bestimmt das Einschwingverhalten beim Beschleunigen und Bremsen. Je größer der
eingegebene Wert, desto eher neigt das System zu Schwingungen.