4 dr eidimensionale w e rk z eug -k or rekt ur – HEIDENHAIN TNC 426 (280 474) Benutzerhandbuch
Seite 108
92
5 Programmieren: Werkzeuge
Peripheral Milling: 3D-Radiuskorrektur mit
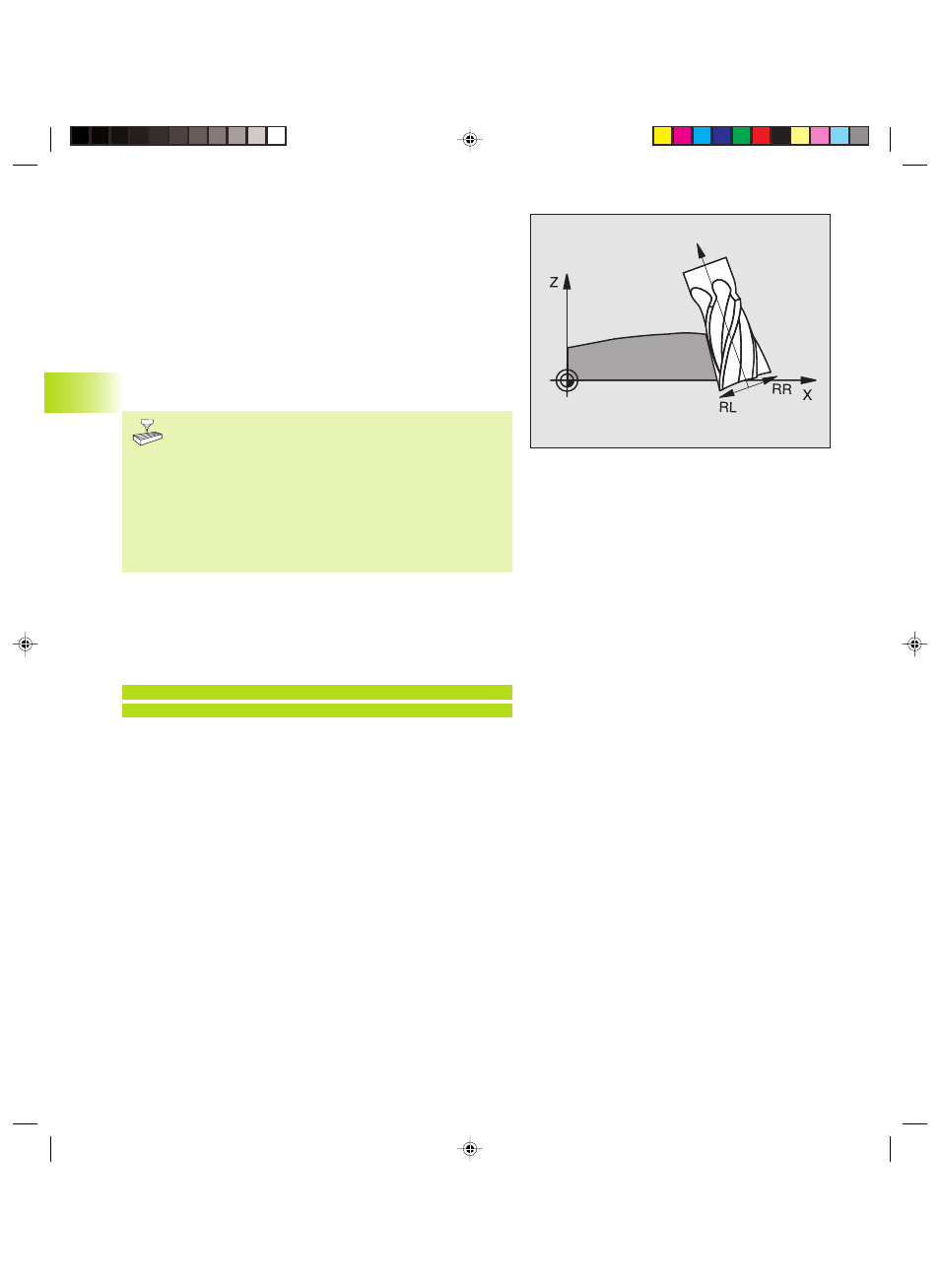
Werkzeug-Orientierung
Die TNC versetzt das Werkzeug senkrecht zur Bewegungsrichtung
und senkrecht zur Werkzeugrichtung um die Summe der Delta-
Werte DR (Werkzeug-Tabelle und TOOL CALL). Die Korrektur-
richtung legen Sie mit der Radiuskorrektur RL/RR fest (siehe Bild
rechts oben, Bewegungsrichtung Y+). Damit die TNC die vorgege-
bene Werkzeug-Orientierung erreichen kann, müssen Sie die
Funktion M128 aktivieren (siehe „7.5 Zusatz-Funktionen für Drehach-
sen“). Die TNC positioniert dann die Drehachsen der Maschine
automatisch so, daß das Werkzeug die vorgegebene Werkzeug-
Orientierung mit der aktiven Korrektur erreicht.
Die TNC kann nicht bei allen Maschinen die Drehachsen
automatisch positionieren. Beachten Sie Ihr Maschinen-
handbuch.
Kollisionsgefahr!
Bei Maschinen, deren Drehachsen nur einen einge-
schränkten Verfahrbereich erlauben, können beim
automatischen Positionieren Bewegungen auftreten, die
beispielsweise eine 180°-Drehung des Tisches erfor-
dern. Achten Sie auf Kollisionsgefahr des Kopfes mit
dem Werkstück oder mit Spannmitteln.
Die Werkzeug-Orientierung können Sie auf zwei Arten definieren:
■
Im LN-Satz durch Angabe der Komponenten TX, TY und TZ
■
In einem L-Satz durch Angabe der Koordinaten der Drehachsen
Satz-Format mit Werkzeug-Orientierung
LN
X+31,737 Y+21,954 Z+33,165
TX+0,0078922 TY0,8764339 TZ+0,2590319 F1000 M128
LN
Gerade mit 3D-Korrektur
X, Y, Z
Korrigierte Koordinaten des Geraden-Endpunkts
TX, TY, TZ
Komponenten des normierten Vektors für die Werk-
zeug-Orientierung
F
Vorschub
M
Zusatzfunktion
5.4 Dr
eidimensionale W
e
rk
z
eug
-K
or
rekt
ur
FKAP5.PM6
28.06.2006, 12:42
92