6 objekt 6086h: motion_profile_type (ds402), 5 funktionsbeschreibung, 6086h – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 101: Objekt 6086h: motion_profile_type (ds402), Funktionsbeschreibung, Canopen antriebsprofil
4.17.4.6
Objekt 6086h: motion_profile_type (DS402)
Die Art der Beschleunigungsrampe kann mit diesem Objekt als lineare Rampe oder als Sin² Rampe
ausgewählt werden.
Index
0x6086
h
Name
motion_profile_type
Objektcode
VAR
Datentyp
INTEGER16
Mode
pp
Zugriff
rw
PDO Mapping
möglich
Einheit
keine
Wertebereich
(-2
15
)..(2
15
-1)
Defaultwert
—
EEPROM
ja
profile code
profile type
-32768..-1
herstellerspez. (wird nicht unterstützt)
0
linear (trapez)
1
sin²
2..32767
profilspez. Erweiterungen (wird nicht unterstützt)
4.17.5
Funktionsbeschreibung
In diesem Profil werden zwei Wege der Positionssollwertübergabe an den Antrieb unterstützt.
Eine Folge von Sollwerten:
Nach Erreichen der Zielposition berechnet der Antrieb sofort die Bewegung zur vorher
übergebenen neuen Zielposition. Dies führt zu einer kontinuierlichen Bewegung, ohne dass
der Antrieb zwischendurch auf Geschwindigkeit 0 abbremst. Beim AX2000/2500
ist dies nur bei Verwendung von Trapezrampen möglich.
Einzelne Sollwerte:
Nach Erreichen der Zielposition signalisiert der Antrieb an den Master, dass er das Ziel
erreicht hat und erhält dann einen neuen Sollwert. Nach Erreichen der Zielposition ist die
Geschwindigkeit normalerweise 0 bevor die Achse zu einer neuen Zielposition fährt.
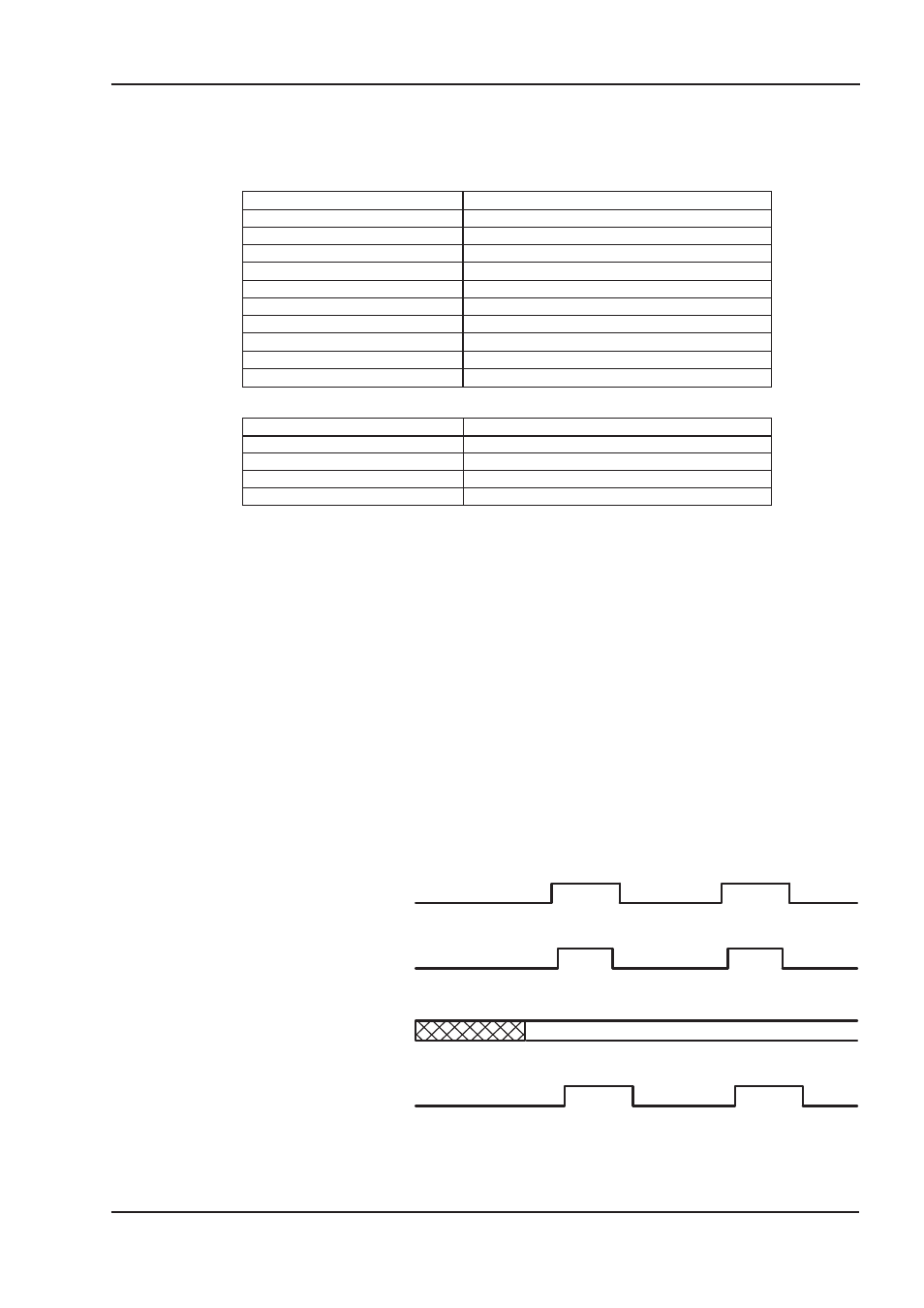
Die zwei Arten werden über das Timing der Bits new_setpoint, change_set_immediately des Steu-
erworts und das Bit setpoint_acknowledge des Zustandswort gesteuert. Diese Bits ermöglichen
einen Handshake - Mechanismus, der es ermöglicht einen neuen Sollwert vorzubereiten während
ein alter Fahrauftrag ausgeführt wird. Das verringert Reaktionszeiten innerhalb eines Steuerungs-
programms in einer Steuerung.
CANopen für AX2000/2500
101
BECKHOFF
07/2007
CANopen Antriebsprofil
data
new_setpoint
change_set_immediately
setpoint_acknowledge
(2)
(4)
(6)
(3)
(5)
(1)