Canopen antriebsprofil – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 67
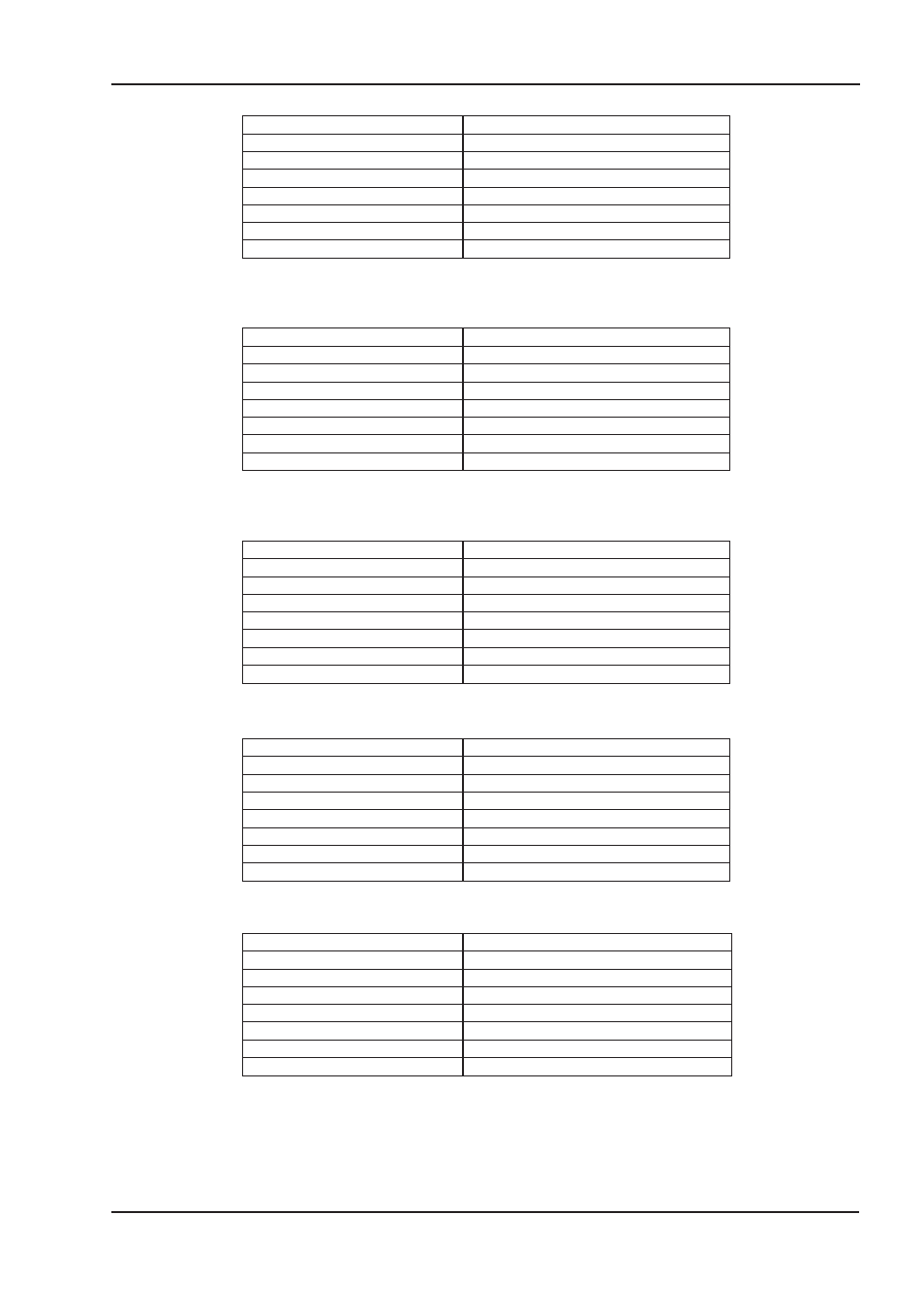
Subindex
04
h
Kurzbeschreibung
Positionsregister 1
Einheit
μm
Zugriff
rw
PDO mapping
nicht möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
0
Je nach Konfiguration wird bei Über- bzw. Unterschreitung der eingestellten Position ein Schwell-
wertbit (Bit 22 herstellerspezifisches Statusregister) gesetzt oder die Achse gestoppt. (Softwareend-
schalter 1 unterschritten = herstellerspezifisches Statusregister Bit 5 = 1).
Subindex
05
h
Kurzbeschreibung
Positionsregister 2
Einheit
μm
Zugriff
rw
PDO mapping
nicht möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
0
Je nach Konfiguration wird bei Über- bzw. Unterschreitung der eingestellten Position ein Schwell-
wertbit (Bit 23 herstellerspezifisches Statusregister) gesetzt oder die Achse gestoppt. (Softwareend-
schalter 2 überschritten = herstellerspezifisches Statusregister Bit 6 = 1).
Subindex
06
h
Kurzbeschreibung
Positionsregister 3
Einheit
μm
Zugriff
rw
PDO mapping
nicht möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
0
Je nach Konfiguration wird bei Über- bzw. Unterschreitung der eingestellten Position ein Schwell-
wertbit (Bit 24 herstellerspezifisches Statusregister) gesetzt.
Subindex
07
h
Kurzbeschreibung
Positionsregister 4
Einheit
μm
Zugriff
rw
PDO mapping
nicht möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
0
Je nach Konfiguration wird bei Über- bzw. Unterschreitung der eingestellten Position ein Schwell-
wertbit (Bit 25 herstellerspezifisches Statusregister) gesetzt.
Subindex
08
h
Kurzbeschreibung
Auflösung / Nenner des Übersetzungsfaktors
Einheit
Umdrehungen
Zugriff
rw
PDO mapping
nicht möglich
Datentyp
UNSIGNED32
Wertebereich
1..(2
32
-1)
Defaultwert
1
Über das Verhältnis der Werte der Subindizes 08
h
und 09
h
wird die mechanische Auflösung der
Achse in μm / Umdrehung vorgegeben.
CANopen für AX2000/2500
67
BECKHOFF
07/2007
CANopen Antriebsprofil