5 homing mode sequence, 17 profile position mode (pp), 1 allgemeine informationen – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 97: 2 objekte, die in diesem kapitel definiert werden, Profile position mode, Homing mode sequence, Profile position mode (pp), Allgemeine informationen, Objekte, die in diesem kapitel definiert werden, Canopen antriebsprofil
4.16.5
Homing Mode Sequence
Mit Setzen des Bit 4 (positive Flanke) wird die Referenzfahrt gestartet. Der erfolgreiche Abschluss
wird mit Bit 12 im Zustandswort angezeigt (s. Objekt 6041
h
). Bit 13 zeigt einen Fehler an, der sich
während der Referenzfahrt ereignet hat. Hier ist der Fehlercode auszuwerten:
Error register (Objekte 1001
h
, 1003
h
), manufacturer status (Objekt1002
h
)
Bit 4
Bedeutung
0
Referenzfahrt inaktiv
0
Þ 1
Referenzfahrt starten
1
Referenzfahrt aktiv
0
Þ 1
Unterbrechung der Referenzfahrt
Bit 13
Bit 12
Bedeutung
0
0
Referenzpunkt nicht gesetzt bzw. Referenzfahrt noch nicht abgeschlossen
0
1
Referenzpunkt gesetzt bzw. Referenzfahrt erfolgreich abgeschlossen
1
0
Referenzfahrt konnte nicht erfolgreich abgeschlossen werden. (Schleppfehler)
1
1
kein erlaubter Zustand
4.17
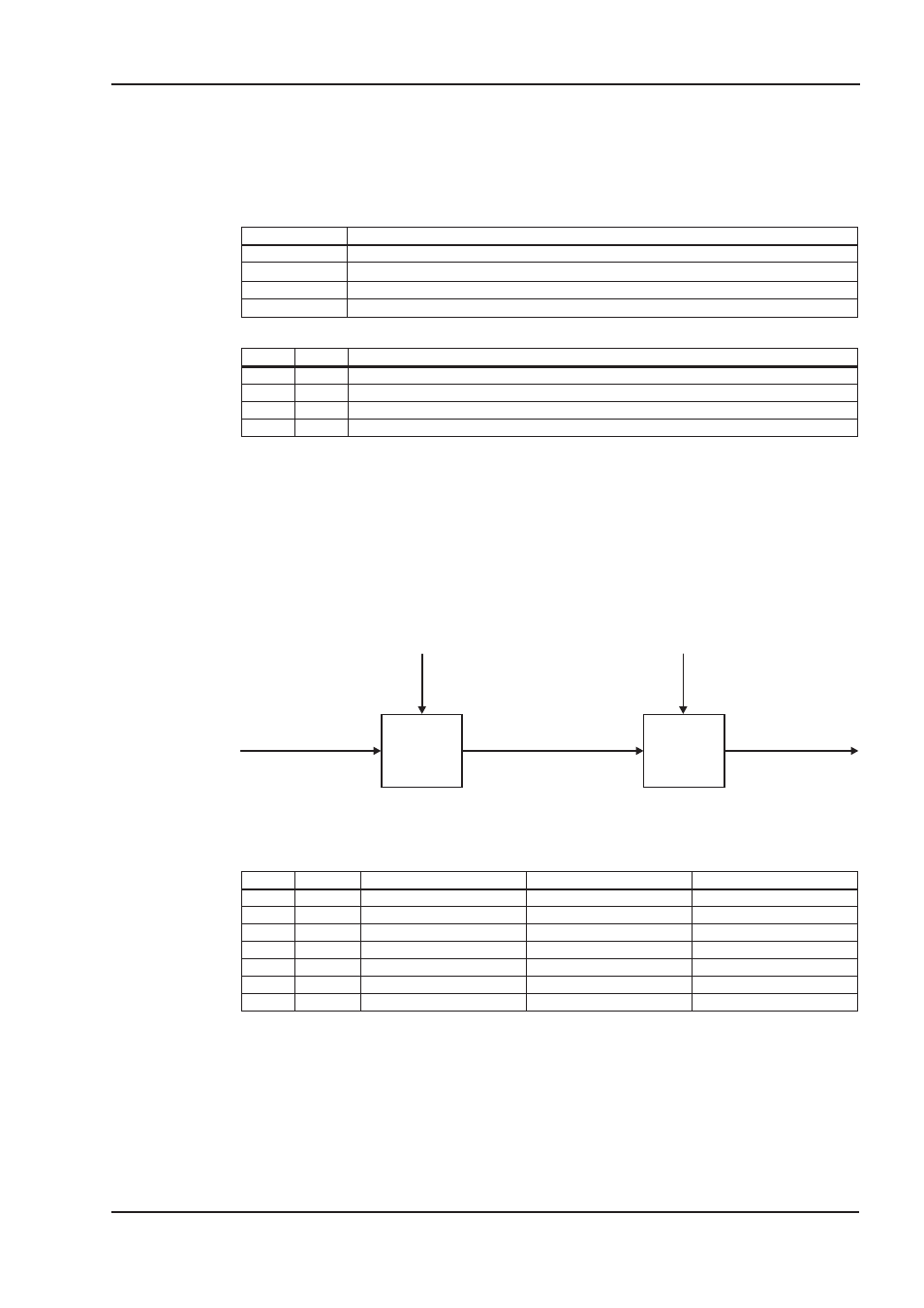
Profile Position Mode (pp)
4.17.1
Allgemeine Informationen
Die Struktur dieser Betriebsart ist hier dargestellt:
Die spezielle Handshake-Verarbeitung von Controlword und Statusword wird in Kap.4.17.4.1
beschrieben.
4.17.2
Objekte, die in diesem Kapitel definiert werden
Index
Objekt
Name
Type
Zugriff
607A
h
VAR
target_position
INTEGER32
rw
607B
h
ARRAY
position_range_limit
INTEGER32
rw
6081
h
VAR
profile_velocity
UNSIGNED32
rw
6083
h
VAR
profile_acceleration
UNSIGNED32
rw
6084
h
VAR
profile_deceleration
UNSIGNED32
rw
6085
h
VAR
quick_stop_deceleration
UNSIGNED32
rw
6086
h
VAR
motion_profile_type
INTEGER16
rw
CANopen für AX2000/2500
97
BECKHOFF
07/2007
CANopen Antriebsprofil
Trajectory
Generator
Trajectory Generator
Parameters
Position Control
Law Parameters
target_position
(607A )
h
control_effort
(60FA )
h
position_demand_value
(60F2 )
h
Position
Control
Function