2 spezielle applikationen, 1 externe trajektorie, 1 lageregler im servoverstärker – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 125: Spezielle applikationen, Externe trajektorie, Lageregler im servoverstärker, Anhang
6.2
Spezielle Applikationen
6.2.1
Externe Trajektorie
6.2.1.1
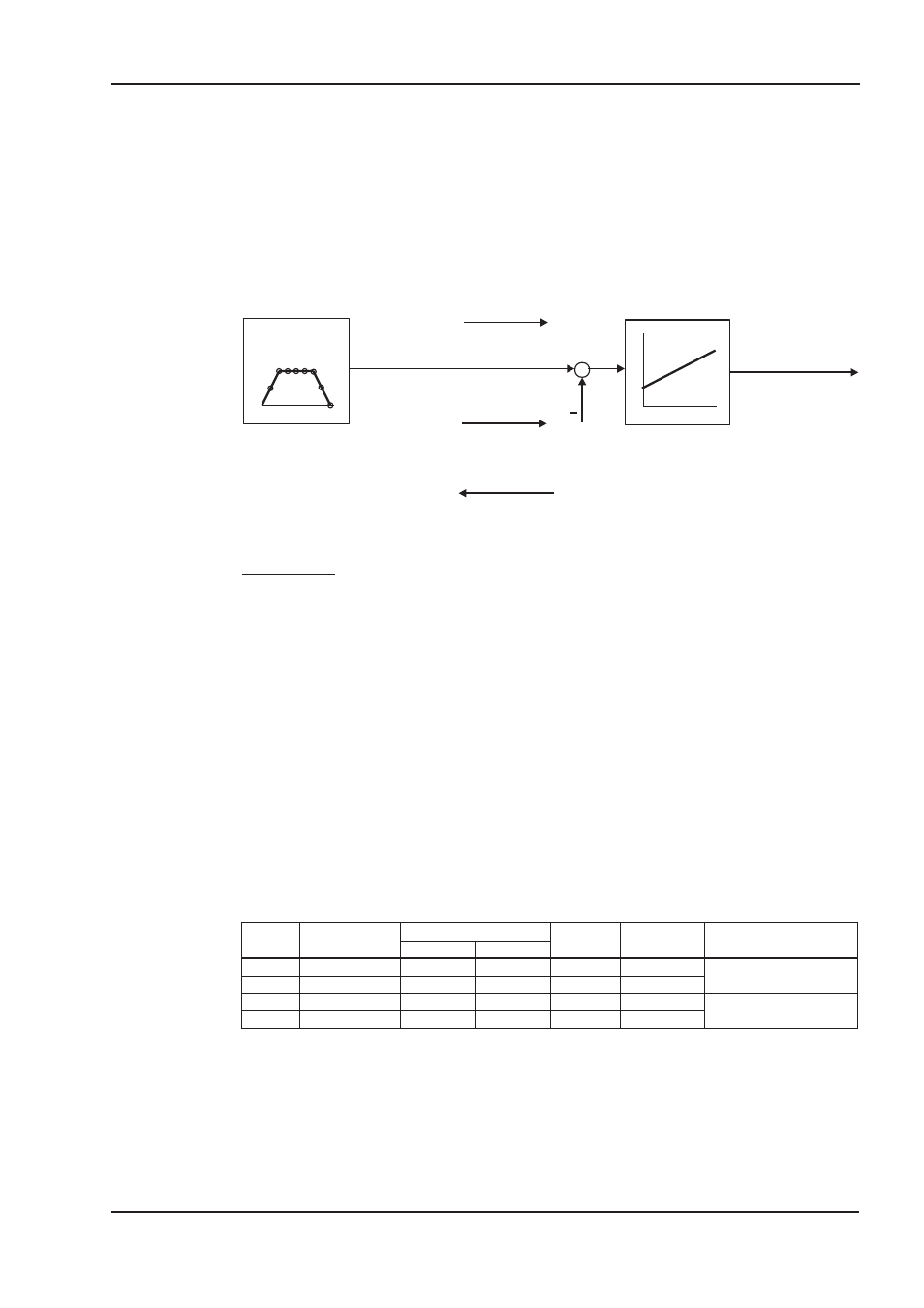
Lageregler im Servoverstärker
In diesem Beispiel wird der Fall betrachtet, in dem 2 Achsen jeweils Positionssollwerte über das
RPDO 33 Trajektorie erhalten.
Reglerstruktur bei Lageregler im Servoverstärker:
Beschreibung
Alle Angaben sind hexadezimal. Die beiden Achsen im System haben im Beispiel die Stations-
adressen 1 und 2.
Beispieltelegramme und -antworten:
Voraussetzungen:
l
Es muss für beide Achsen definiert werden welche Auflösungen innerhalb einer Motorumdre-
hung verwendet werden sollen: PRBASE auf 16 oder 20 Bit pro Umdrehung.
l
Das Zeitraster für Trajektorienvorgabe muss über den Parameter PTBASE eingestellt werden.
Dabei entspricht die Einheit einem Wert von 250 Mikrosekunden, d.h. z.B. PTBASE = 8 ergibt
ein Trajektorienzeitwert von 2 Millisekunden.
l
Die Parameter müssen im EEPROM gespeichert werden.
l
Die gespeicherten Werte stehen erst nach einem Neustart zur Verfügung.
Das PDO Trajektorie enthält 2 Trajektoriensollwerte und kann an mehrere Stationen gleichzeitig
gesendet werden, wobei sich jede Station ihre Trajektoriendaten herausholen kann.
Zweites Receive-PDO für beide Achsen auf das RPDO 33 Trajektorie (33
d
= 21
h
) mappen:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
2F
01
26
00
h
21 00 00 00
PDO Trajektorie für 1.
Achse eingestellt
581
60
01
26
00
h
00 00 00 00
602
2F
01
26
00
h
21 00 00 00
PDO Trajektorie für 2.
Achse eingestellt
582
60
01
26
00
h
00 00 00 00
CANopen für AX2000/2500
125
BECKHOFF
07/2007
Anhang
Positionssollwerte
SYNC
RPDO Trajektorie
Nr. 33
Positionsregler
Drehzahlsollwert
Position + Status
TPDO Inkrementeller Positionsistwert
Nr. 33