2 objekt 607bh: position_range_limit (ds402), 3 objekt 6081h: profile_velocity (ds402), 607bh – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 99: 6081h, Objekt 607bh: position_range_limit (ds402), Objekt 6081h: profile_velocity (ds402), Canopen antriebsprofil
4.17.4.2
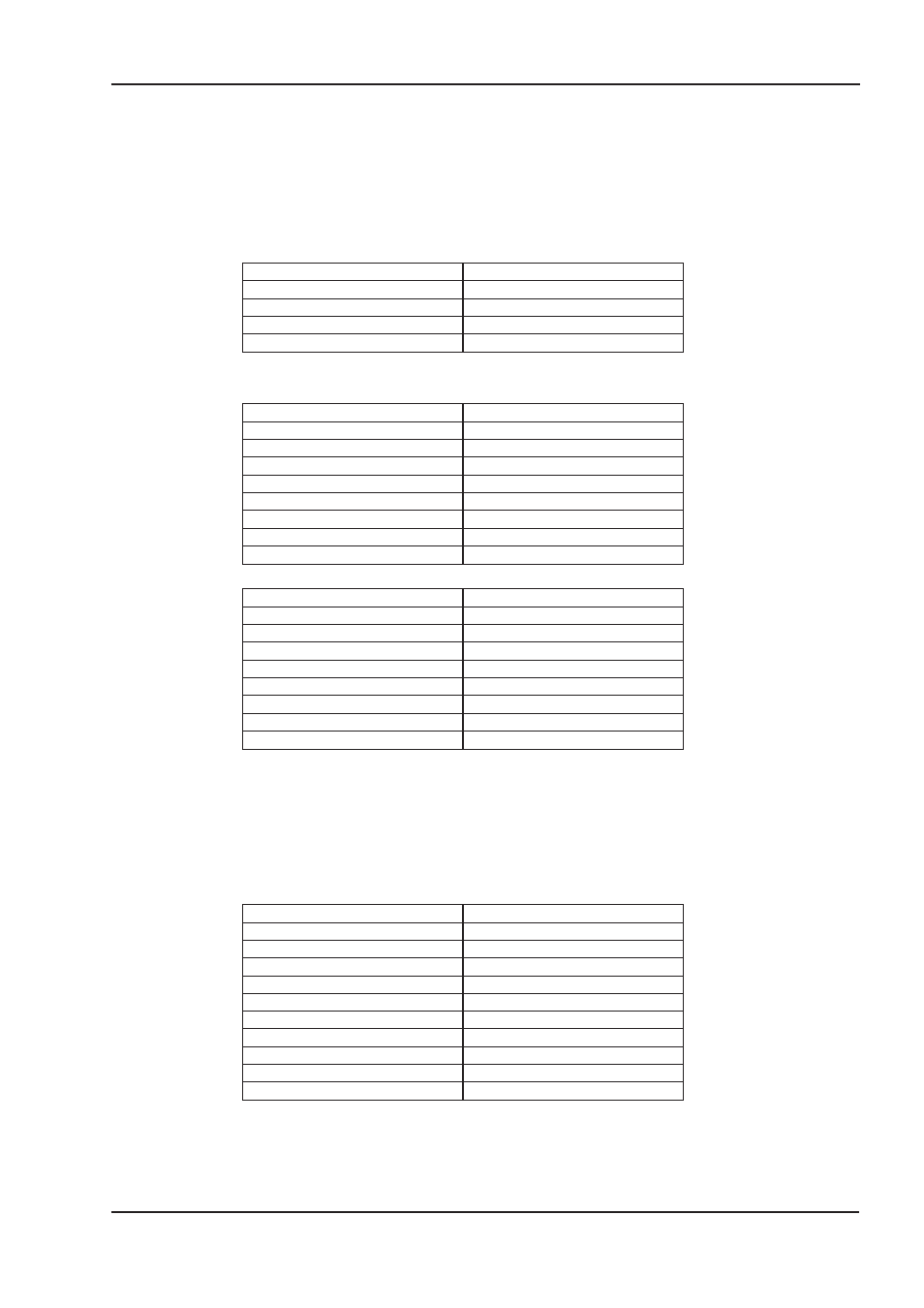
Objekt 607Bh: position_range_limit (DS402)
Mit dem Objekt “position_range_limit” wird der Anfang und das Ende des Verfahrbereiches für eine
Modulo - Achse festgelegt. Der Anfang des Bereiches wird mit Subindex 01
h
“min_posi-
tion_range_limit” (ASCII SRND) und das Ende mit Subindex 02
h
“max_position_range_limit” (ASCII
ERND) definiert. Diese Funktionalität kann erst nach einer Neukonfiguration des Geräts verwendet
werden. Dazu muss das Objekt 2020
h
Subindex 01
h
mit dem Wert 2 versehen werden und danach
die Konfigurationsprozedur gestartet werden (
Þ Kap. 6.4).
Index
0x607B
h
Name
position_range_limit
Objektcode
ARRAY
Anzahl Elemente
3
Datentyp
INTEGER32
Beschreibung der Subindizes:
Subindex
01
h
Kurzbeschreibung
min_position_range_limit
Mode
pp, pc
Zugriff
rw
PDO Mapping
nicht möglich
Einheit
position units
Wertebereich
(-2
31
)..(2
31
-1)
EEPROM
ja
Defaultwert
-2
31
Subindex
02
h
Kurzbeschreibung
max_position_range_limit
Mode
pp, pc
Zugriff
rw
PDO Mapping
nicht möglich
Einheit
position units
Wertebereich
(-2
31
)..(2
31
-1)
EEPROM
ja
Defaultwert
2
31
-1
4.17.4.3
Objekt 6081h: profile_velocity (DS402)
Die profile_velocity ist die Endgeschwindigkeit, die nach der Beschleunigungsphase eines Fahrauf-
trages erreicht werden soll. Die verwendete Skalierung ist abhängig von dem eingestellten “velo-
city_encoder_factor” (Objekt 6094
h
).
Der Sollwert wird in Abhängigkeit des eingestellten Operationsmode (pp, pv) benutzt.
Index
0x6081
h
Name
profile_velocity
Objektcode
VAR
Datentyp
UNSIGNED32
Mode
pp, pv
Zugriff
rw
PDO Mapping
möglich
Einheit
speed units
Wertebereich
0..(2
32
-1)
Defaultwert
10
EEPROM
nein
CANopen für AX2000/2500
99
BECKHOFF
07/2007
CANopen Antriebsprofil