5 pdo trajektorie (33), 6 pdo fahrsatz (34), Pdo trajektorie (33) – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 43: Pdo fahrsatz (34), Canopen antriebsprofil
4.3.1.1.5
PDO Trajektorie (33)
Das PDO Trajektorie ist ein zeit- und datenoptimiertes PDO. Dieses PDO darf nur im Mode “Trajek-
torie” benutzt werden. Das PDO Trajektorie muss in immer gleichen Zeitabständen (einstellbar mit
dem Kommando “PTBASE”) übertragen werden, da es sonst zu Einbrüchen im Drehzahlverlauf
kommt. Dieses PDO besteht aus zwei Komponenten, den inkrementellen Istwerten für zwei Ach-
sen. Die Zuordnung der Daten für die Achsen, die beide auf den gleichen COB-ID für dieses RPDO
eingestellt werden müssen (Subindex 01
h
der entsprechenden Kommunikations-
parameter), erfolgt über das Objekt 2721
h
.
Beispiel zur Berechnung der absoluten Position:
Position
inkrementeller Positionswert
2
20
=
Die max. Differenz zwischen zwei inkrementellen Positionen wird durch die eingestellte Enddreh-
zahl (ASCII - Kommando VLIM) vorgegeben (s. Beispiel).
Beispiel zur maximalen inkrementellen Positionsdifferenz:
max.erreichbare Enddrehzahl / 1000
Umd.
min
0,016667
Umd
=
.
ms
ink.Pos.(t ) ink.Pos.(t )
2
0,016667
17475
2
1
20
-
£
´
=
In Abhängigkeit der eingestellten Verstärkerparameter kann es zu einem mehr oder weniger großen
Schleppfehler kommen. Tritt die Fehlermeldung “Schleppfehler” auf und die Achse wird mit der Not-
bremsrampe angehalten, so kann das mehrere Fehlerursachen haben:
l
Die inkrementelle Positionsdifferenz ist zu groß gewählt worden (s.o.).
l
Das Schleppfehlerfenster ist zu klein eingestellt worden (Objekt 2020
h
Subindex 03
h
)
l
Verstärkerparameter sind nicht optimal eingestellt
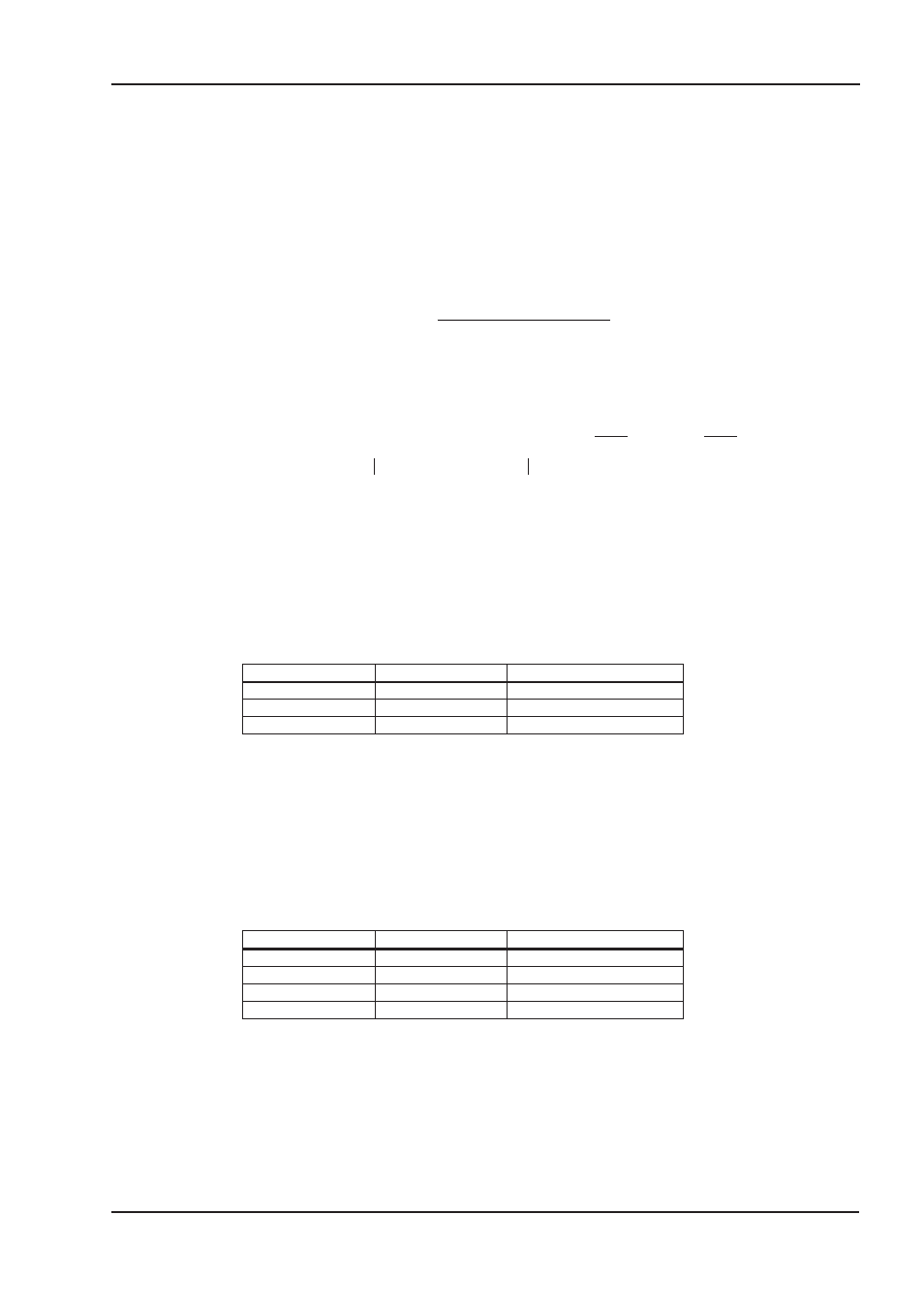
Die Tabelle beschreibt das Mapping des PDO Trajektorie:
Subindex
Wert
Beschreibung
00
h
2
h
Anzahl der Einträge
01
h
20220420
h
Inkrementelle Position
02
h
20220420
h
Inkrementelle Position
Dieses Objekt unterstützt nicht den Übertragungstyp 255 (asynchron).
4.3.1.1.6
PDO Fahrsatz (34)
Das PDO Fahrsatz setzt sich aus Position (SIGNED32, gewichtet), Geschwindigkeit (UNSIG-
NED16) und der Fahrauftragsart (UNSIGNED16) zusammen.
Das PDO startet einen Fahrsatz aus dem flüchtigen Fahrsatzspeicher (Fahrsatznummer = 0) und
ist ausschließlich im Mode “Lage“ verwendbar.
Die Tabelle beschreibt das Mapping des PDO Fahrsatz:
Subindex
Wert
Beschreibung
00
h
3
h
Anzahl der Einträge
01
h
20220120
h
Position
02
h
20220210
h
Geschwindigkeit
03
h
20220310
h
Fahrauftragsart (abs. / rel.)
Dieses Objekt unterstützt nur den Übertragungstyp 255 (asynchron).
CANopen für AX2000/2500
43
BECKHOFF
07/2007
CANopen Antriebsprofil