Canopen antriebsprofil – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 55
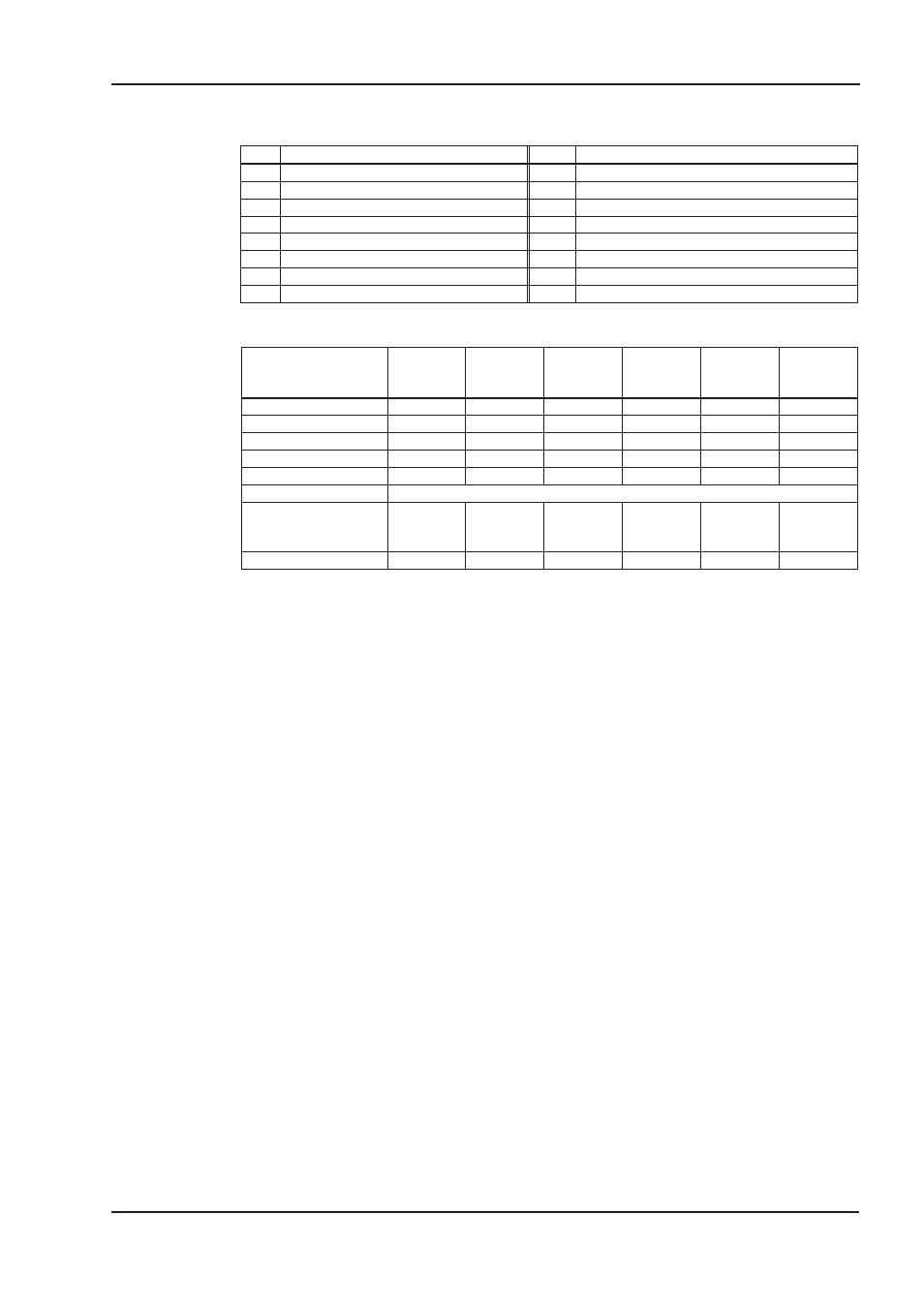
Bitbelegung im statusword
Bit
Name
Bit
Name
0
Ready to switch on
8
Manufacturer specific (reserviert)
1
Switched on
9
Remote (nicht unterstützt)
2
Operation enable
10
Target reached
3
Fault (i.V.)
11
Internal limit active
4
Disable voltage
12
Operation mode specific (reserviert)
5
Quick stop
13
Operation mode specific (reserviert)
6
Switch on disabled
14
Manufacturer specific (reserviert)
7
Warning
15
Manufacturer specific (reserviert)
Zustände der Statusmaschine
State
Bit 6
switch on
disable
Bit 5
quick stop
Bit 3
fault
Bit 2
operation
enable
Bit 1
switched on
Bit 0
ready to
switch on
Not ready to switch on
0
X
0
0
0
0
Switch on disabled
1
X
0
0
0
0
Ready to switch on
0
1
0
0
0
1
Switched on
0
1
0
0
1
1
Operation enabled
0
1
0
1
1
1
Fault
Wird z. Zt. nicht unterstützt
Fault reaction active
Wird z. Zt.
nicht unter-
stützt
X
X
X
X
15
Quick stop active
0
0
0
1
1
1
Die mit X gekennzeichneten Bits sind irrelevant
Beschreibung der restlichen Bits im statusword
Bit 4: voltage_disable Die Zwischenkreisspannung liegt an, wenn das Bit gelöscht ist.
Bit 7: warning Für das Setzen von Bit 7 kann es mehrere Gründe geben, die zu dieser Warnung
geführt haben. Der Grund für diese Warnung kann anhand des Objekt 1002
h
“herstellerspezifisches
Statusregister“ ermittelt werden. (
Þ Kap. 4.2.1.3)
Bit 8: Toggle – Bit Mode Tippbetrieb, Referenzierung ,Lage, Positionierung (pp), Referenzierung
(hm) Das Toggle - Bit wird immer dann verändert (setzen bzw. rücksetzen), wenn ein Fahrsatz
erfolgreich ausgeführt wurde (Inkrement genau in Zielposition!). Das Bit wird nicht “getoggelt”, wenn
ein Fahrsatz abgebrochen wird (z.B.: mit dem STOP – Kommando oder beim Schleppfehler). Die
Auswertung des Toggle - Bits kann in Kombination mit dem Bit 10 “target reached” (Objekt 6041
h
)
und “Fahrsatz aktiv” Bit 16 (Objekt 1002
h
) erfolgen. Die Auswertung des Bits ist dann sinnvoll, wenn
aufgrund der Fahrsatzdaten keine Änderung des Bits 10 oder Bits 16 sichtbar werden (sehr kurze
oder gleiche Fahrsätze).
Bit 9: remote Wird nicht unterstützt
Bit 10: target_reached Wird gesetzt, wenn der Antrieb die Zielposition erreicht hat.
Bit 11: internal_limit_active Ist im Parameter DRVCNFG das Bit 20 gesetzt, wird dieses Bit bei
den folgenden anstehenden Warnungen gesetzt:
- Ansprechüberwachung (n04)
- SW-Endschalter 1 (n06)
- SW-Endschalter 2 (n07)
- nicht gesetzter Referenzpunkt (n09)
- P-STOP (n10)
- N-STOP (n11)
- Slot-Warnung (n13)
Bit 12: profile position mode setpoint acknowledge
digital speed modes velocity 0 detection (1 = speed = 0)
CANopen für AX2000/2500
55
BECKHOFF
07/2007
CANopen Antriebsprofil