Canopen antriebsprofil – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 81
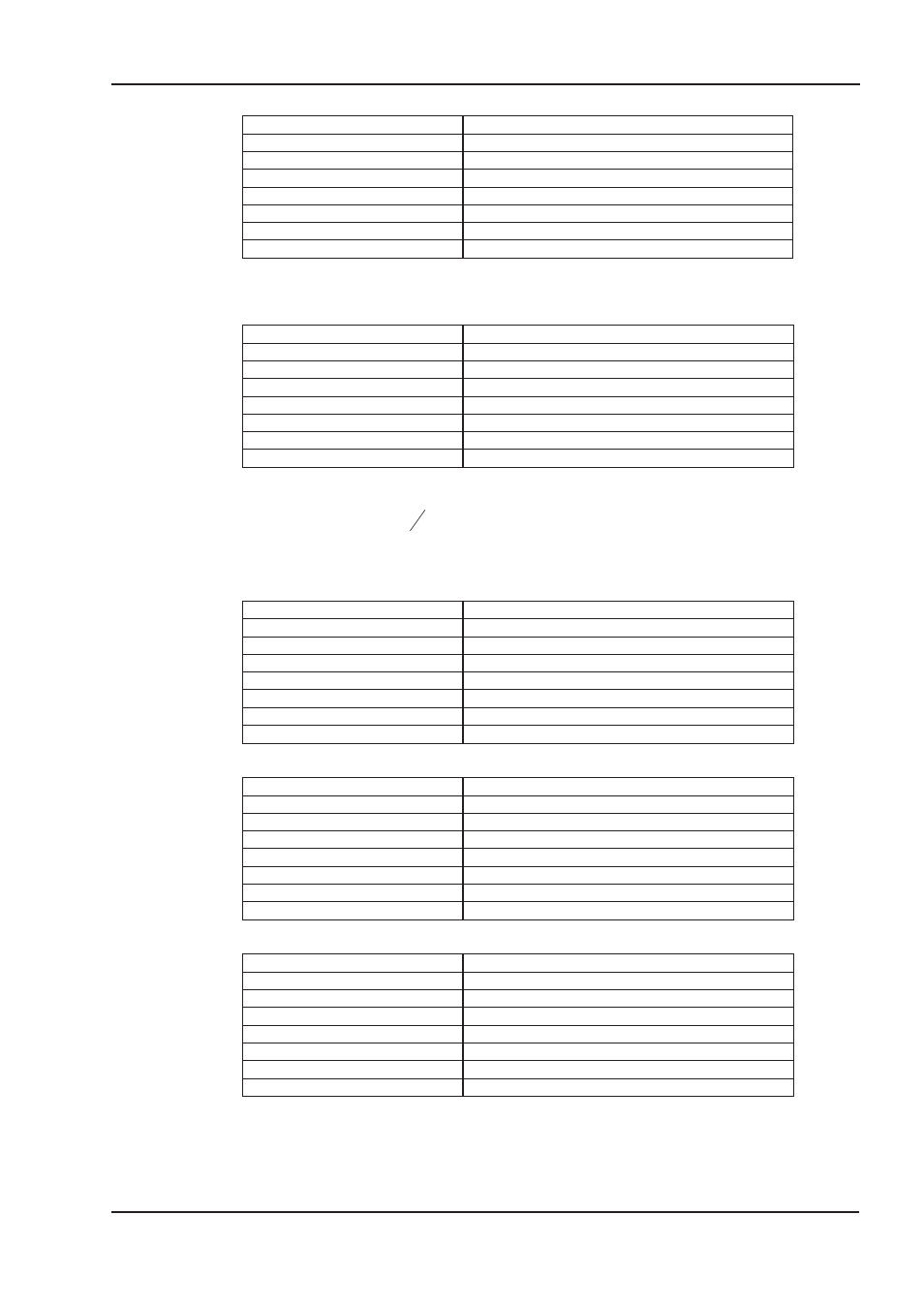
Subindex
05
h
Kurzbeschreibung
Lesen des 32 Bit Positionslatch
Einheit
—
Zugriff
ro
PDO mapping
möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
)..(2
31
-1)
Defaultwert
0
Lesen der gespeicherten (gelatchten) 32 Bit Position. Die Position wird in Inkrementen innerhalb
einer Umdrehung ausgegeben. Die Ausgabe wird nicht von den Getriebefaktoren oder den Factor
Groups beeinflusst.
Subindex
06
h
Kurzbeschreibung
SI Positionsistwert
Einheit
μm
Zugriff
ro
PDO mapping
möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
0
Lesen der Istposition als SI – Einheit. Das Verhältnis von real zurückgelegter Strecke zu Motorum-
drehungen wird durch
S
SI
S
Inkr
PGEARI
PGEARO
=
´
bestimmt, wobei PGEARO (Objekt 2020
h
, Subindex 08
h
)
die Anzahl der Inkremente enthält, die gefahren werden, wenn die zu fahrende Strecke PGEARI
(Objekt 2020
h
, Subindex 09
h
) beträgt. Zu beachten ist, dass dabei eine Motorumdrehung einer
Inkrementzahl von 2
20
= 1048576 entspricht.
Subindex
07
h
Kurzbeschreibung
SI Geschwindigkeitsistwert
Einheit
μm/s
Zugriff
ro
PDO mapping
nicht möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
0
Lesen der Istgeschwindigkeit in SI – Einheiten gelesen
Subindex
08
h
Kurzbeschreibung
Schleppfehler
Einheit
μm
Zugriff
ro
PDO mapping
nicht möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
0
Lesen des momentan gemessenen Schleppfehlers in SI – Einheiten.
Subindex
09
h
Kurzbeschreibung
Effektivstrom
Einheit
mA
Zugriff
ro
PDO mapping
nicht möglich
Datentyp
UNSIGNED32
Wertebereich
0..2 * Nennstrom [mA]
Defaultwert
0
Lesen des momentan gemessenen Effektivstroms.
CANopen für AX2000/2500
81
BECKHOFF
07/2007
CANopen Antriebsprofil