5 beispiel für fahrsatzverarbeitung, Beispiel für fahrsatzverarbeitung, Beckhoff – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 120
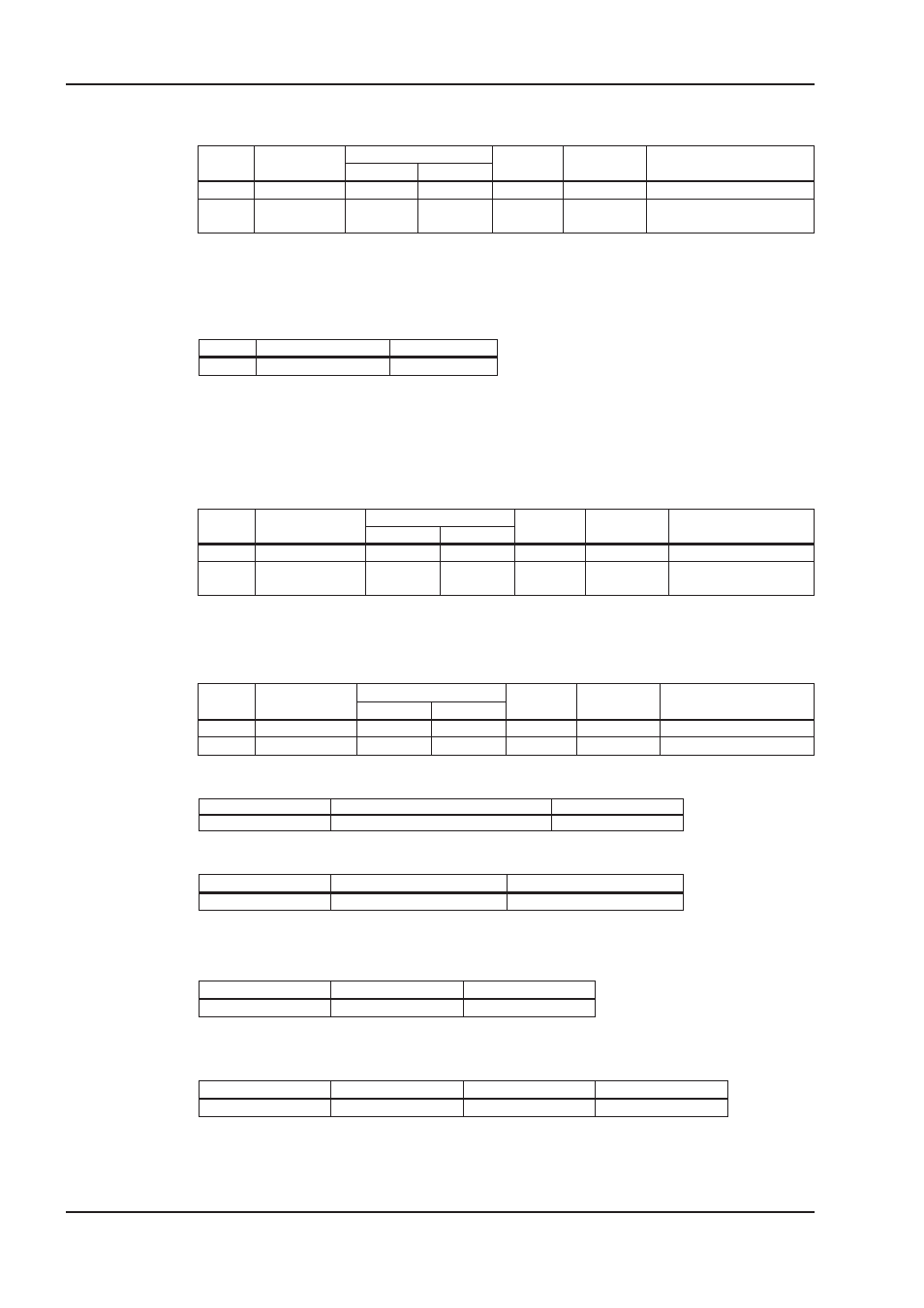
Nun kann die Referenzfahrt mit Bit 4 des CANopen - Controlwords gestartet werden:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
2B
40
60
00
h
1F 00 00 00
Mode
581
60
40
60
00
h
00 00 00 00
Referenzfahrt läuft bis
Referenzbedingung erfüllt
Mit der steigenden Flanke des Bits "Referenzpunkt gesetzt" im herstellerspezifischen Statusregis-
ters kann erkannt werden, dass der Sevoantrieb sein Positionssystem geeicht hat. Der Vorgang der
Referenzierung ist mit Rücksetzen des Bits "Fahrauftrag aktiv" beendet.
Ein TPDO1 könnte also wie folgt aussehen:
COB-ID
Daten
Kommentar
181
05 27 00 00 0A 54
Mode
Der Zustand der Referenzfahrt lässt sich über das erweiterte Statusregister, Bit 17 (Referenzpunkt
gesetzt) erkennen.
6.1.5
Beispiel für Fahrsatzverarbeitung
Lageregelung einschalten
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
2F
60
60
00
h
FF 00 00 00 Lageregelmode
581
60
60
60
00
h
00 00 00 00
Lageregelung
eingeschaltet
Zweites Receive-PDO mappen
(Starte Fahrsatz, Fahrsätze für Beispiel schon definiert. 1. Receive-PDO steht standardmäßig auf
dem controlword.)
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
2F
01
26
00
h
23 00 00 00
Starte Fahrsatz Objekt
581
60
01
26
00
h
00 00 00 00
OK, gemappt
NMT-Zustandsmaschine auf “operational” schalten
COB-ID
Command specifier (CS)
Node-ID
0
1
1
Zweites Receive-Objekt ansprechen
COB-ID
Fahrsatznummer-Low
Fahrsatznummer-High
301
01
00
Antwort: keine, angegebener Fahrsatz 1 wird abgearbeitet
Motor Quick Stop
COB-ID
Control-Low
Control-High
201
03
00
Antwort: keine, Motor wird mit t_not angehalten
Regler sperren (disable)
COB-ID
Control-Low
Control-High
Fahrsatznummer
201
03
00
1
Antwort: keine, Antrieb wird drehmomentfrei
120
CANopen für AX2000/2500
Anhang
07/2007
BECKHOFF