2 objekt 60ffh: target_velocity (ds402), 15 position control function (pc) (ds402), 1 allgemeine informationen – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 92: 2 objekte, die in diesem kapitel definiert werden, 60ffh, Position control function, Objekt 60ffh: target_velocity (ds402), Position control function (pc) (ds402), Allgemeine informationen, Objekte, die in diesem kapitel definiert werden
4.14.4.2
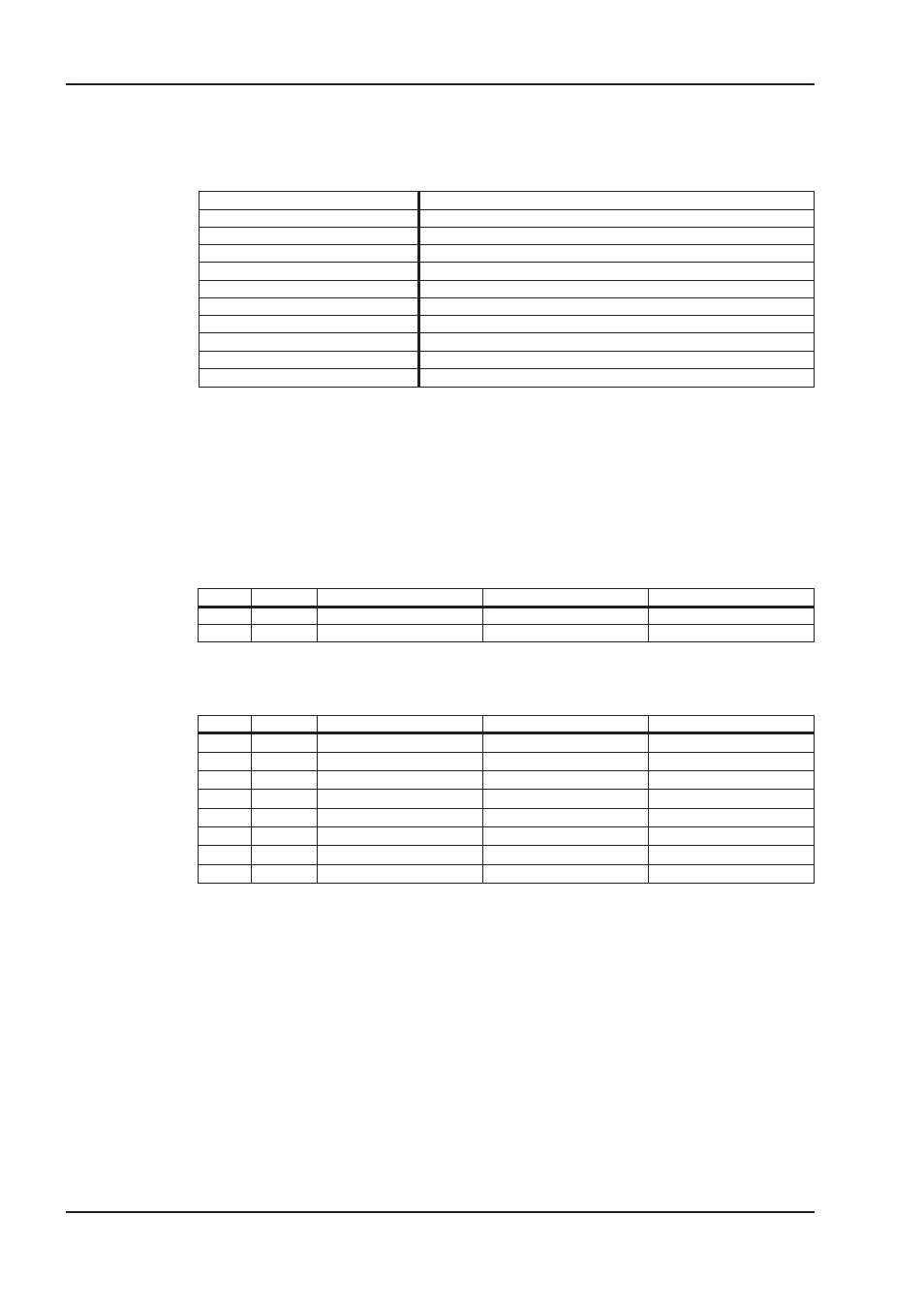
Objekt 60FFh: target_velocity (DS402)
Die Solldrehzahl (target_velocity) repräsentiert den Sollwert für den Rampengenerator. Die Skalie-
rung des Wertes hängt von dem Faktor “velocity_encoder_resolution” (Objekt 6096
h
) ab.
Index
0x60FF
h
Name
target_velocity
Objektcode
VAR
Datentyp
INTEGER32
Mode
pv
Zugriff
rw
PDO Mapping
möglich
Einheit
Inkremente
Wertebereich
(-2
31
)..(2
31
-1)
Defaultwert
—
EEPROM
nein
4.15
Position Control Function (pc) (DS402)
4.15.1
Allgemeine Informationen
In diesem Kapitel werden die Positionsistwerte beschrieben, die im Zusammenhang mit dem Lage-
regler des Antriebs stehen. Sie finden Verwendung im Profile Position Mode.
4.15.2
Objekte, die in diesem Kapitel definiert werden
Index
Objekt
Name
Type
Zugriff
6063
h
VAR
position_actual_value*
INTEGER32
ro
6064
h
VAR
position_actual_value
INTEGER32
ro
4.15.3
Objekte, die in anderen Kapiteln definiert werden
Index
Objekt
Name
Type
Kapitel
607A
h
VAR
target_position
INTEGER32
pp (
Þ Kap. 4.17)
607B
h
VAR
position_range_limit
INTEGER32
pp (
Þ Kap. 4.17)
607C
h
VAR
home-offset
INTEGER32
hm (
Þ Kap. 4.16)
6093
h
VAR
position_factor
UNSIGNED32
fg (
Þ Kap. 4.5)
6094
h
ARRAY
velocity_encoder_factor
UNSIGNED32
fg (
Þ Kap. 4.5)
6096
h
ARRAY
acceleration_factor
UNSIGNED32
fg (
Þ Kap. 4.5)
6040
h
VAR
controlword
INTEGER16
dc (
Þ Kap. 4.4)
6041
h
VAR
statusword
UNSIGNED16
dc (
Þ Kap. 4.4)
92
CANopen für AX2000/2500
CANopen Antriebsprofil
07/2007
BECKHOFF