Beckhoff – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 122
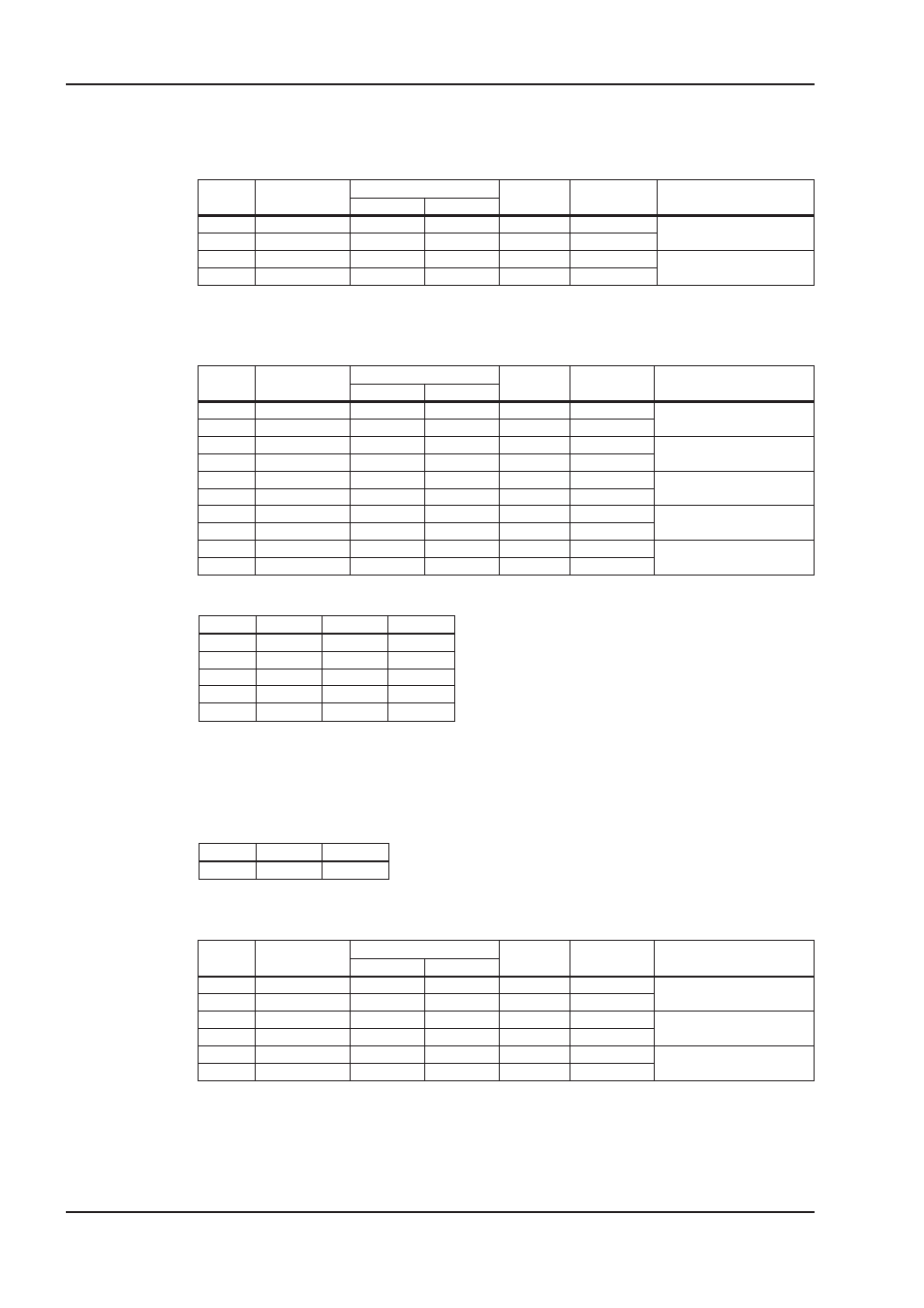
Falls die mechanische Auflösung vorgegeben werden soll, kann diese nun über Objekt 6093
h
, Sub-
index 01
h
und 02
h
geschrieben werden. Die Voreinstellung nach dem Einschalten des Antriebs ent-
spricht den antriebspezifischen Faktoren PGEARI und PGEARO:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
23
93
60
01
h
00 00 10 00
2
20
Inkremente
581
60
93
60
01
h
00 00 00 00
601
23
93
60
02
h
A0 8C 00 00
3600 Nutzereinheiten
581
60
93
60
02
h
00 00 00 00
Im Beispiel könnte man zum Beispiel einen Rundtisch mit einer Winkelauflösung von 0,1 Grad
bedienen.
Nach diesen Einstellungen kann eine Referenzfahrt eingestellt und angestoßen werden:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
2B
40
60
00
h
0F 00 00 00
Controlword: Operation En-
able
581
60
40
60
00
h
00 00 00 00
601
2F
60
60
00
h
06 00 00 00
Betriebsart: Homing Mode
einstellen
581
60
60
60
00
h
00 00 00 00
601
2F
98
60
00
h
0C 00 00 00 Referenzfahrt 12, negative
Fahrtrichtung
581
60
98
60
00
h
00 00 00 00
601
23
99
60
01
h
40 19 01 00
Referenzfahrtgeschw.
72000 Einh./s = 2 s
-!
581
60
99
60
01
h
00 00 00 00
601
2B
40
60
00
h
1F 00 00 00
Referenzfahrt starten
581
60
40
60
00
h
00 00 00 00
Nach dem Start der Referenzfahrt könnten dann folgende Telegramme des 1. TPDO kommen:
COB-ID
Byte 0
Byte 1
Byte 2
181
27
00
21
181
27
10
27
181
27
10
23
181
27
14
2B
181
27
15
2A
Für die Erkennung des Endes der Referenzfahrt sind folgende Bits des Bytes 2 erforderlich:
Bit 0 = 0 Referenzfahrt abgeschlossen, Bit 1 = 1 Referenzpunkt gesetzt, Bit 3 = 1 In Position.
Anschließend wird die Referenzfahrt auch über das Steuerwort beendet, diesmal über das
1. RPDO:
COB-ID
Byte 0
Byte 1
201
0F
00
Nun kann in den Profile Position Mode geschaltet werden und Rampen für Positionierungen vorge-
geben werden:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
23
83
60
00
h
32 00 00 00
50ms Beschleunigungszeit
581
60
83
60
00
h
00 00 00 00
601
23
84
60
00
h
32 00 00 00
50ms Bremszeit
581
60
84
60
00
h
00 00 00 00
601
2F
60
60
00
h
01 00 00 00
Profile Position Mode
581
60
60
60
00
h
00 00 00 00
122
CANopen für AX2000/2500
Anhang
07/2007
BECKHOFF