Beckhoff – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 86
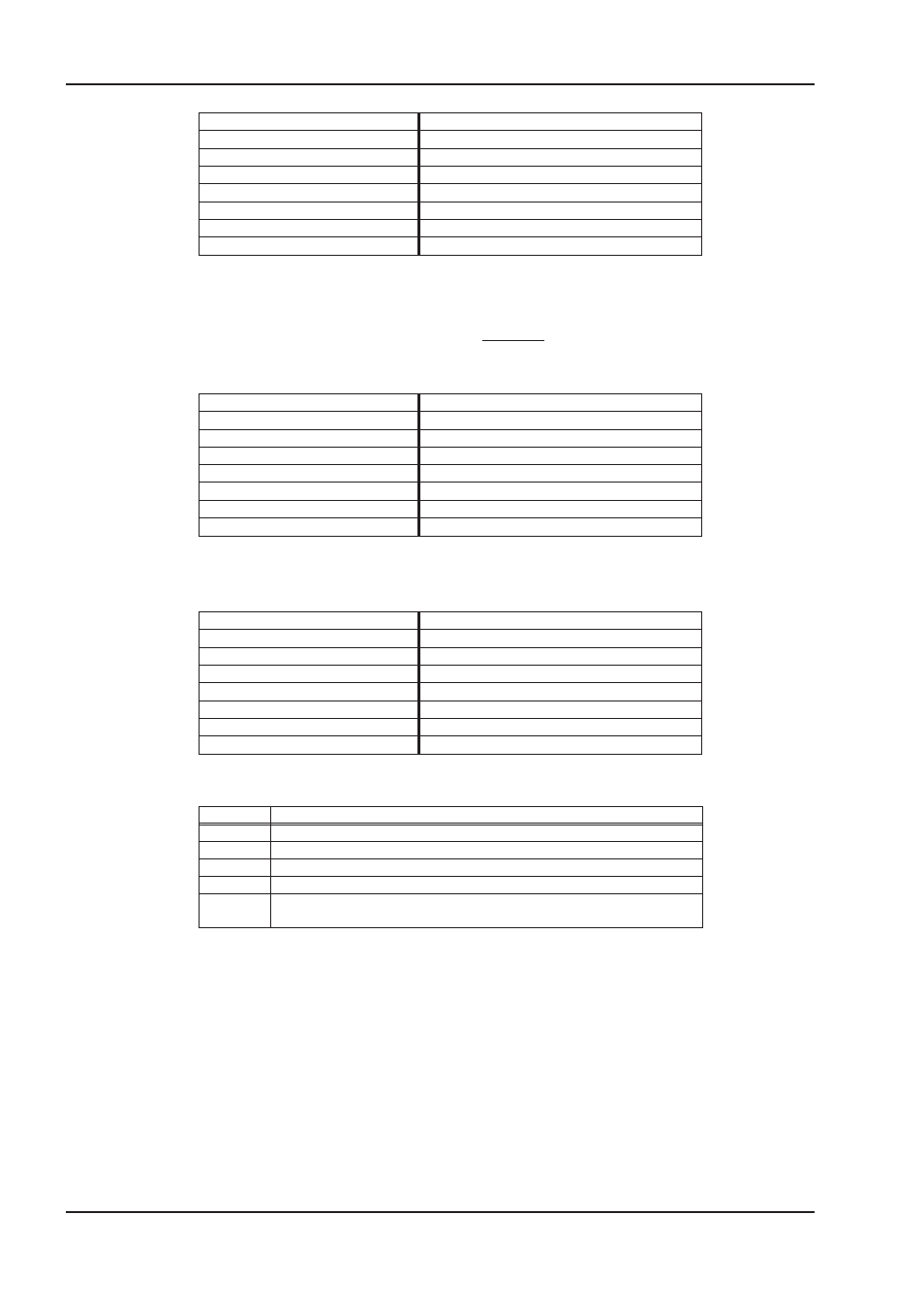
Subindex
17
h
Kurzbeschreibung
Interner Geschwindigkeitssollwert
Einheit
—
Zugriff
ro
PDO mapping
möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
—
Auslesen des internen Geschwindigkeitssollwerts. Ein interner Geschwindigkeitscount entspricht
dabei einem Positionscount / 250 Mikrosekunden.
Die Geschwindigkeit in rpm ergibt sich daraus zu:
v
v
rpm
incr
=
×
×
4000
2
60
20
Subindex
18
h
Kurzbeschreibung
Mastergeschwindigkeit (elektronisches Getriebe)
Einheit
—
Zugriff
ro
PDO mapping
möglich
Datentyp
UNSIGNED32
Wertebereich
0..(2
32
-1)
Defaultwert
—
Dieses Objekt liefert die Geschwindigkeit, die sich aus den eingelesenen Mastergeberimpulsen im
elektronischen Getriebe (Mode 0xF7) ergibt.
Subindex
19
h
Kurzbeschreibung
Steuervariable (elektronisches Getriebe)
Einheit
—
Zugriff
ro
PDO mapping
möglich
Datentyp
INTEGER8
Wertebereich
-(2
7
-1)..(2
7
-1)
Defaultwert
0
Mit diesem Objekt wird der Zustand bzw. der Übergang beim Aufsynchronisieren/Abkoppeln im
elektronischen Getriebe angezeigt. Folgende Werte sind definiert (nur bei ENGAGE = 1 oder 3):
Wert
Bedeutung
0
Keine Synchronisation
1
Aufsynchronisieren auf Mastergeschwindigkeit mit Rampe ACCR
2
Auskoppeln mit Rampe DECR
3
Synchronfahrt zum Master
4
Aufsynchronisieren über die Strecke, die über Objekt 2050 sub 5 vorgegeben
wurde
86
CANopen für AX2000/2500
CANopen Antriebsprofil
07/2007
BECKHOFF