Anhang – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 127
Um die Achsen zu starten, müssen nun die Servoverstärker in den fahrbereiten Zustand (operatio-
nal enable) gebracht und die Netzwerkmanagementfunktionen gestartet werden.
Die Netzwerkmanagementfunktionen, die die Verwendung der Prozessdatenobjekte freischalten,
werden durch das folgende Telegramm für beide Achsen gestartet:
NMT (Network Management) - Zustandsmaschine auf „operational“ schalten
COB-ID
Command specifier (CS)
Node-ID
Kommentar
0
1
1
Alle Achsen NMT freigeben
Danach werden die Servoverstärker einzeln bestromt und in den Zustand „operation enable“
gebracht.
Steuerwort für Enable Operation
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
2B
40
60
00
h
0F 00 00 00
Steuerwort für Achse 1
581
60
40
60
00
h
00 00 00 00
602
2B
40
60
00
h
0F 00 00 00
Steuerwort für Achse 2
582
60
40
60
00
h
00 00 00 00
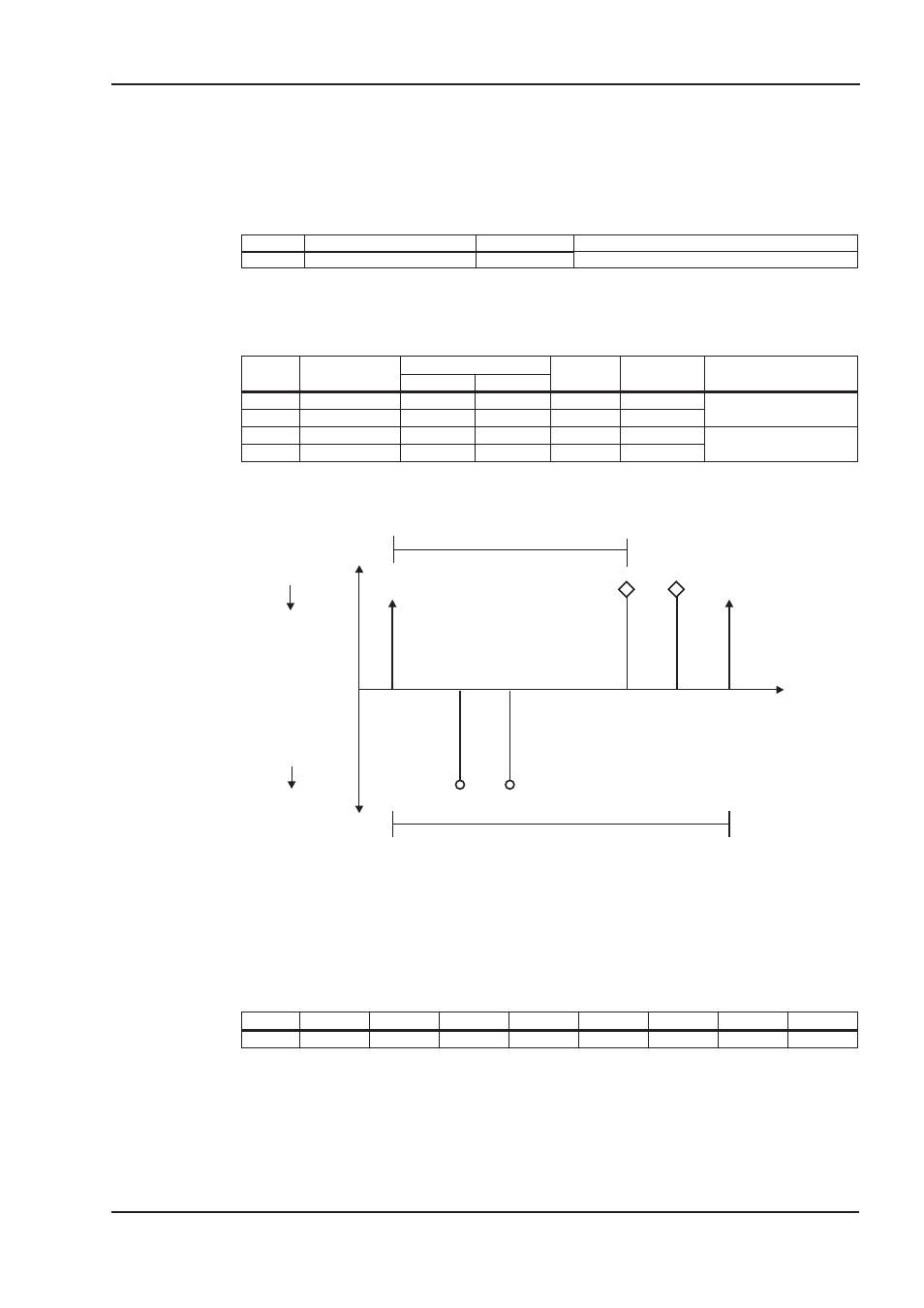
Durch die obige Konfiguration wird jetzt, wie im folgenden Bild dargestellt, ein zyklischer Ablauf
ermöglicht:
Nun können über das RPDO 2 Trajektoriendaten für beide Achsen vorgegeben werden, z.B. wie
folgt:
COB-ID
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
301
F4
01
00
00
E8
03
00
00
In diesem Beispiel bekommt die erste Achse einen Trajektorienwert von 500 Inkrementen (Bytes
0..3) und die zweite Achse einen Trajektorienwert von 1000 Inkrementen.
Die Werte werden von den Achsen übernommen und mit Erhalt des nächsten SYNC – Telegramms
positioniert.
CANopen für AX2000/2500
127
BECKHOFF
07/2007
Anhang
Steuerung
Drive
Drive
Steuerung
t cycle
Sollwert
Achse
1
Sync
Sync
Sollwert
Achse
2
Posiiotn
&
S
tatus
Achse
1
Position
&
S
ta
tus
Achse
2
400 μs
cycle
t
1 ms pro Achse bei 1 MBaud
z.B. 2 Achsen