2 lageregler in der steuerung, Lageregler in der steuerung, Beckhoff – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 128
Das SYNC – Telegramm sieht dabei wie folgt aus:
COB-ID
080
Beide Achsen senden anschließend ihre inkrementellen Positionen und ihre Statusregister beim
Erhalt des SYNC-Objekts mit der COB-ID des 2. TPDOs zurück:
COB-ID
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7 Kommentar
181
23
01
00
00
00
00
03
44
Position und Hersteller-
statusregister Achse1
182
A5
02
00
00
00
00
03
44
Position und Hersteller-
statusregister Achse2
Tritt im Verlauf der Bedienung ein Fehler auf, wird von der betroffenen Achse eine Emergency-Mes-
sage gesendet, die z.B. so aussehen kann:
Emergency – Objekt
COB-ID
Emergency error code
Error
register
Kategorie
Low
High
081
10
43
08
01
00 00 00 00
Motortemperatur, tempera-
ture, manufacturer specific
081
00
00
08
00
00 00 00 00
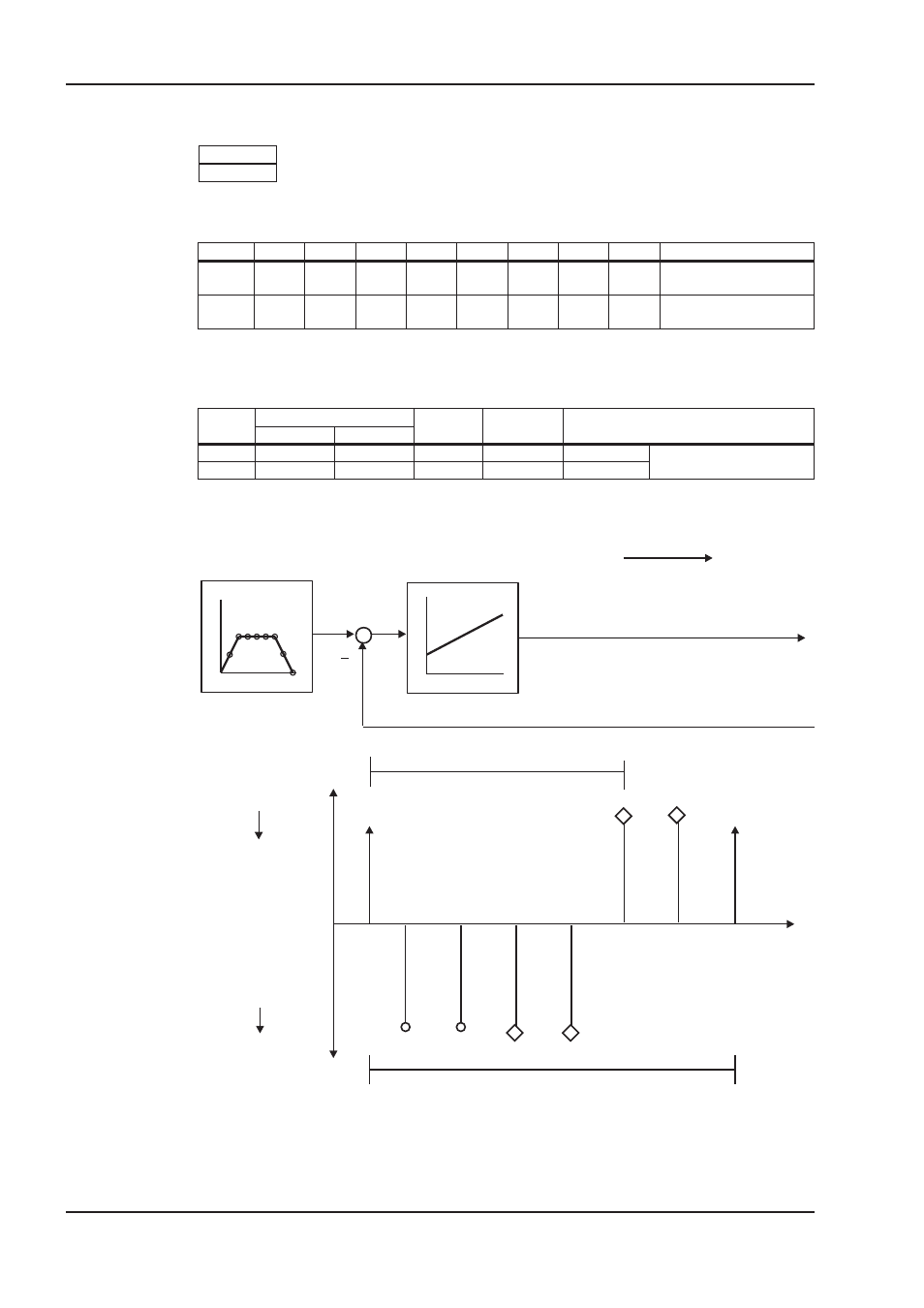
6.2.1.2
Lageregler in der Steuerung
128
CANopen für AX2000/2500
Anhang
07/2007
BECKHOFF
Steuerung
Drive
Drive
Steuerung
tcycle
Drehzahlsollwert
Achse
1
Sync
Sync
S
tatus
Achse
1
S
tatus
Achse
2
400 μs
cycle
t
1 ms pro Achse bei 1 MBaud
z.B. 2 Achsen
Drehzahlsollwert
Achse
2
Pos.istwert
Achse
1
Pos.istwert
Achse
2
SYNC
RPDO Trajektorie Nr. 32
Positionsregler
Drehzahlsollwert
Status
TPDO "Erweiterter Status" Nr. 23
Trajektorie