Beckhoff – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 126
Nachdem das PDO Trajektorie nun auf zwei Achsen gemappt ist, müssen die Kommunikationspa-
rameter bei beiden so eingestellt werden, dass sie auf denselben Kommunikationsobjekt-Identifier
(COB-ID) reagieren. Der COB-ID für die erste Station kann dabei auf seinem Defaultwert 301 blei-
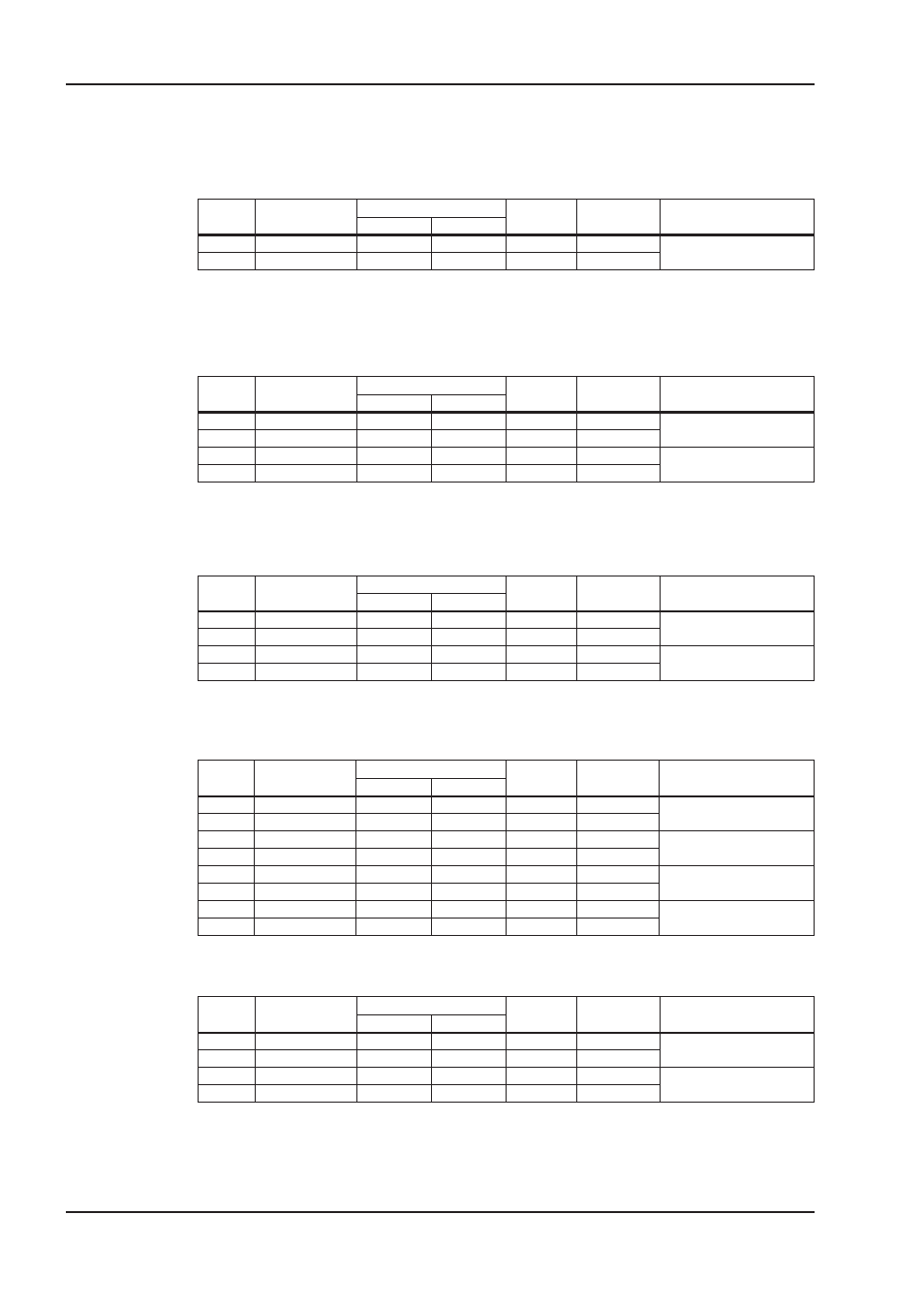
ben, der für die zweite Station kann dann auf diesen umgemappt werden:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
602
23
01
14
01
h
01 03 00 00
2. RPDO für 2. Achse auf
301 mappen
582
60
01
14
01
h
00 00 00 00
Beide Stationen reagieren jetzt auf denselben COB-ID 301.
Mit dem Objekt 2721
h
Subindex 00
h
kann dann bestimmt werden aus welchem Teil des 8
Byte-Datenfelds jede Achse ihre Trajektorie bezieht. Mit dem Wert 0 werden dabei die Bytes 0..3
der Daten ausgewählt, mit dem Wert 1 die Bytes 4..7:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
2F
21
27
00
h
00 00 00 00
1. Achse verwendet Byte
0..3 als Wert
581
60
21
27
00
h
00 00 00 00
602
2F
21
27
00
h
04 00 00 00
2. Achse verwendet Byte
4..7 als Wert
582
60
21
27
00
h
00 00 00 00
Die Istpositionen der Achsen sollen auch als inkrementelle Istpositionen an die Steuerung zurück-
kommen. Daher werden die jeweils zweiten Transmit-PDOs auf das TPDO 33 Inkrementeller Posi-
tionsistwert (33
d
= 21
h
) gemappt.:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
2F
01
2A
00
h
21 00 00 00
PDO Trajektorie für 1.
Achse eingestellt
581
60
01
2A
00
h
00 00 00 00
602
2F
01
2A
00
h
21 00 00 00
PDO Trajektorie für 2.
Achse eingestellt
582
60
01
2A
00
h
00 00 00 00
Es wird hier davon ausgegangen, dass die beiden Geräte mit jedem SYNC-Kommando neue Tra-
jektorienwerte übernehmen und ihre inkrementellen Positionsistwerte zurücksenden sollen. Also
müssen die Kommunikationsparameter entsprechend eingestellt werden:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
2F
01
14
02
h
01 00 00 00
RPDO 2 Achse 1 Reaktion
auf jedes SYNC
581
60
01
14
02
h
00 00 00 00
602
2F
01
14
02
h
01 00 00 00
RPDO 2 Achse 2 Reaktion
auf jedes SYNC
582
60
01
14
02
h
00 00 00 00
601
2F
01
18
02
h
01 00 00 00
TPDO 2 Achse 1 Reaktion
auf jedes SYNC
581
60
01
18
02
h
00 00 00 00
602
2F
01
18
02
h
01 00 00 00
TPDO 2 Achse 2 Reaktion
auf jedes SYNC
582
60
01
18
02
h
00 00 00 00
Damit Trajektorien gefahren werden können, müssen sich beide Servoverstärker im entsprechen-
den Modus befinden. Dies wird über den Index 6060
h
eingestellt:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
2F
60
60
00
h
FA 00 00 00 Trajektorienmodus für
Achse 1 einstellen
581
60
60
60
00
h
00 00 00 00
602
2F
60
60
00
h
FA 00 00 00 Trajektorienmodus für
Achse 2 einstellen
582
60
60
60
00
h
00 00 00 00
126
CANopen für AX2000/2500
Anhang
07/2007
BECKHOFF