Beckhoff – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 70
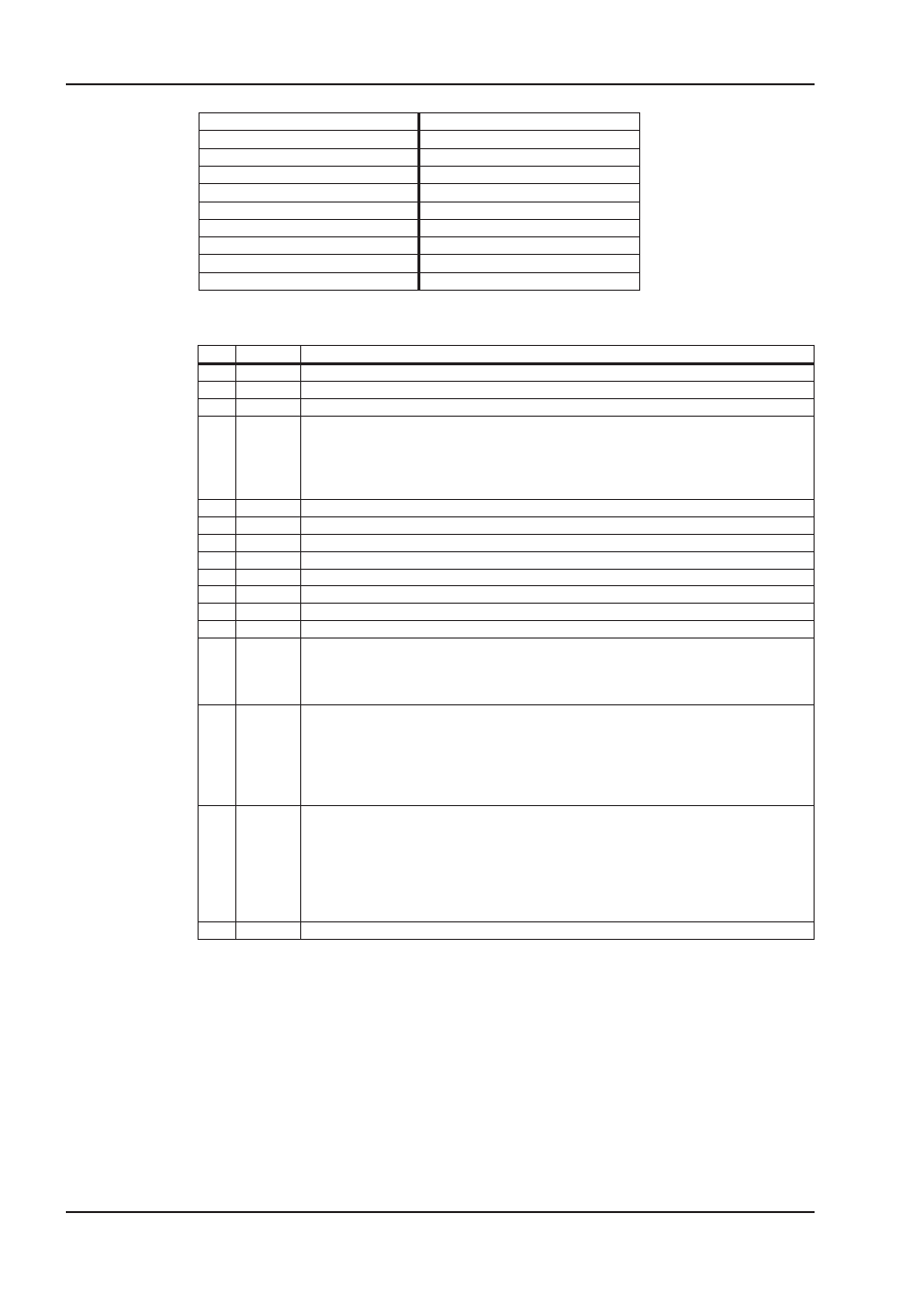
Subindex
03
h
Kurzbeschreibung
Fahrauftragsart
Mode
pp
Zugriff
rw
PDO mapping
nicht möglich
Datentyp
UNSIGNED8
Einheit
—
Wertebereich
0..FFFF
h
EEPROM
nein
Defaultwert
0
Über diesen Index werden Fahrparameter des Fahrauftrags eingestellt. Die Bedeutung der Bits wird
in den folgenden Tabellen erklärt.
Bit
Wert
Bedeutung
0
0x0001
h
Bit für die Art des relativen/absoluten Fahrsatzes (s. Tabelle 2)
1
0x0002
h
Bit für die Art des relativen Fahrsatzes (s. Tabelle 2)
2
0x0004
h
Bit für die Art des relativen Fahrsatzes (s. Tabelle 2)
3
0x0008
h
=0 kein Folgefahrsatz vorhanden, nach dem Erreichen der Zielposition
bleibt der Antrieb stehen
=1 Folgefahrsatz vorhanden, nach dem Erreichen der Zielposition wird
automatisch der Folgefahrsatz gestartet. Die Nummer des
Folgefahrsatzes wird mit dem Kommando O_FN vorgegeben.
4
0x0010
h
Bit für die Art des Folgefahrsatzes (s. Tabelle 3)
5
0x0020
h
Bit für die Art des Folgefahrsatzes (s. Tabelle 3)
6
0x0040
h
Bit für die Art des Folgefahrsatzes (s. Tabelle 3)
7
0x0080
h
Bit für die Art des Folgefahrsatzes (s. Tabelle 3)
8
0x0100
h
Bit für die Art des Folgefahrsatzes (s. Tabelle 3)
9
0x0200
h
reserviert
10
0x0400
h
reserviert
11
0x0800
h
reserviert
12
0x1000
h
=0 die Brems- und Anfahrbeschleunigung wird als Brems-/Anfahrzeit von 0
auf die Zielgeschwindigkeit (in msek) vorgegeben.
=1 die Brems- und Anfahrbeschleunigung wird in mm/sek² vorgegeben.
(s. auch Kommandos O_ACC1, O_ACC2, O_DEC1, O_DEC2).
13
0x2000
h
=0 die Zielposition und die Zielgeschwindigkeit des Fahrsatzes werden als
Inkremente interpretiert. Es findet keine Umrechnung statt.
=1 die Zielposition und die Zielgeschwindigkeit werden vor dem Start des
Fahrsatzes in Inkremente umgerechnet. Für die Umrechnung werden
die Parameter PGEARI und PGEARO benutzt.
(s. auch Kommandos O_S, O_V, PGEARI, PGEARO)
14
0x4000
h
=0 die Geschwindigkeit des Fahrsatzes wird beim Fahrsatzstart als die
Zielgeschwindigkeit übernommen.
=1 die Zielgeschwindigkeit wird beim Fahrsatzstart analog vorgegeben
(SW1). Beim Start des Fahrsatzes wird der analoge SW1-Wert
eingelesen und als die Zielgeschwindigkeit übernommen
(Skalierung: 10V=VSCALE1).
Das Vorzeichen der SW1-Spannung wird ignoriert.
15
0x8000
h
Bit 3 für die Art des relativen Fahrsatzes (s. separate Tabelle)
70
CANopen für AX2000/2500
CANopen Antriebsprofil
07/2007
BECKHOFF