Beckhoff – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 102
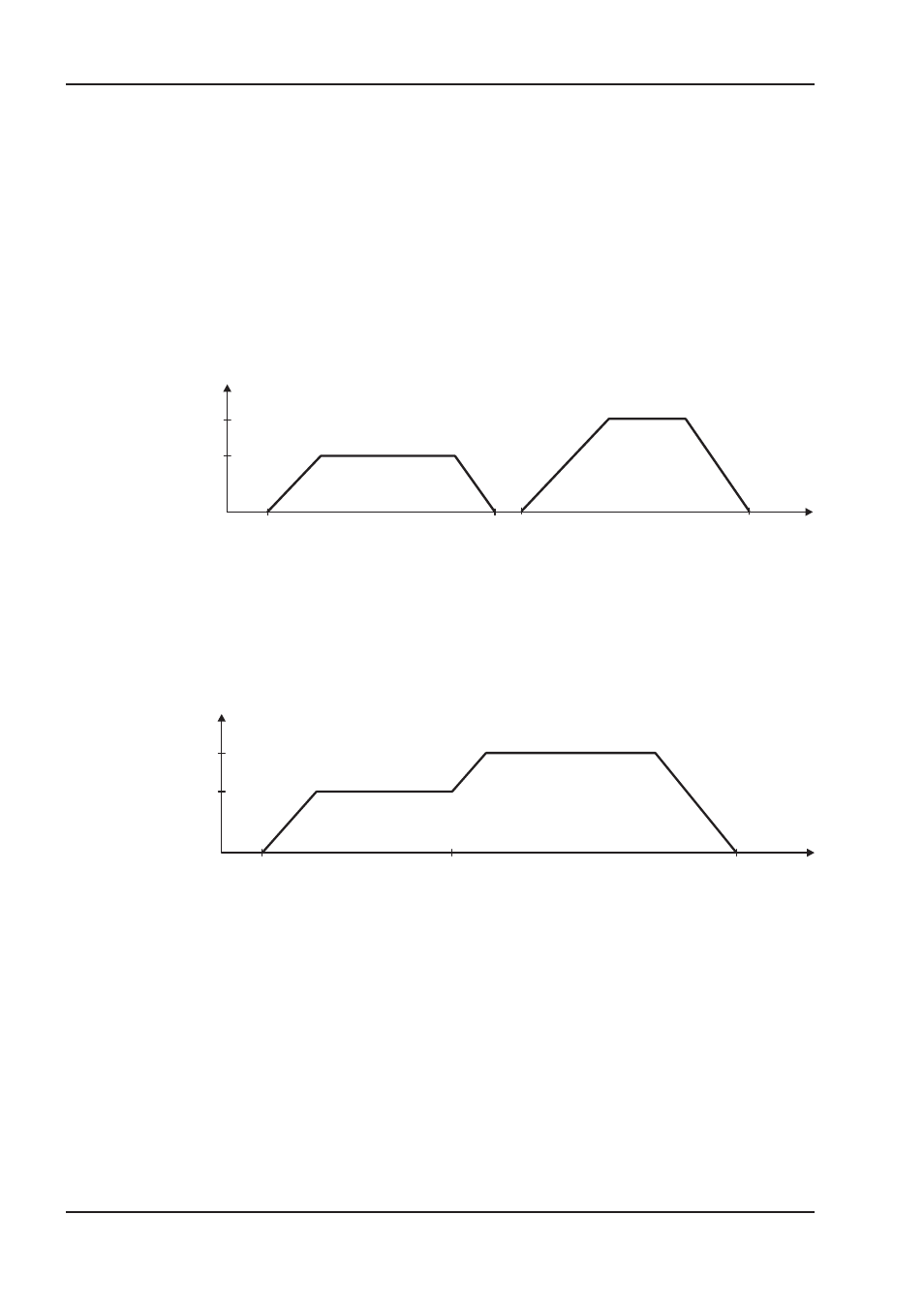
Die Bilder zeigen den Unterschied zwischen einer "Folge von Sollwerten" und einzelnen Sollwerten.
Der Startwert des Bits change_set_immediatly im Steuerwort entscheidet über die verwendete Art.
Die betrachteten Beispiele gelten nur für Trapezrampen. Wenn das Bit change_set_immediatly auf
0 ist (durchgehender Strich in Bild 1) wird ein einzelner Sollwert vom Antrieb erwartet (1). Nachdem
Daten an den Antrieb übergeben wurden, signalisiert der Master durch den Wechsel am Bit
new_setpoint im Steuerwort auf "1", dass die Daten gültig sind (2). Der Antrieb antwortet mit dem
setpoint_acknowledge Bit = 1 im Zustandswort nachdem er den Wert erkannt und gespeichert hat
(3). Nun kann der Master das Bit new_setpoint auf 0 setzen (4) woraufhin der Antrieb durch Rüc-
ksetzen des Bits setpoint_acknowledge signalisiert, dass er wieder neue Sollwerte entgegenneh-
men kann (5). In Bild 2 führt dieser Mechanismus zu einer Geschwindigkeit von 0 nachdem eine
Rampe gefahren wurde, um eine Zielposition X
1
zur Zeit t
1
zu erreichen. Nach dem Signal an den
Master, dass das Ziel erreicht wurde, wird die neue Zielposition zum Zeitpunkt t
2
verarbeitet und
zum Zeitpunkt t
3
erreicht.
Mit dem Bit change_set_immediatly = 1 (symbolisiert durch die gestrichelte Linie in Bild 1) weist der
Master den Antrieb an direkt nach dem Erreichen des letzten Sollwerts einen neuen Sollwert zu ver-
arbeiten. Das Timing der Signale bleibt das gleiche. Diese Vorgehensweise bewirkt beim Antrieb,
dass er schon den nächsten Sollwert X
2
verarbeitet und Geschwindigkeit behält, wenn er die Ziel-
position X
1
zum Zeitpunkt t
1
erreicht. Danach fährt der Antrieb zur schon berechneten Zielposition
X
2
.
Bits im controlword:
Bit 4
new_set_point (positive Flanke!)
Bit 5
change_set_immediatly
Bit 6
absolut / relativ
Bits im statusword:
Bit 12 setpoint acknowledge
Bit 13 following error
102
CANopen für AX2000/2500
CANopen Antriebsprofil
07/2007
BECKHOFF
Zeit
v
2
v
1
t
0
t
1
t
2
t
3
Drehzahl
Zeit
v
2
v
1
t
0
t
1
t
2
Drehzahl