3 objekt 6093h: position_factor (ds402), 6093h, Objekt 6093h: position_factor (ds402) – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 59: Canopen antriebsprofil
4.5.2.3
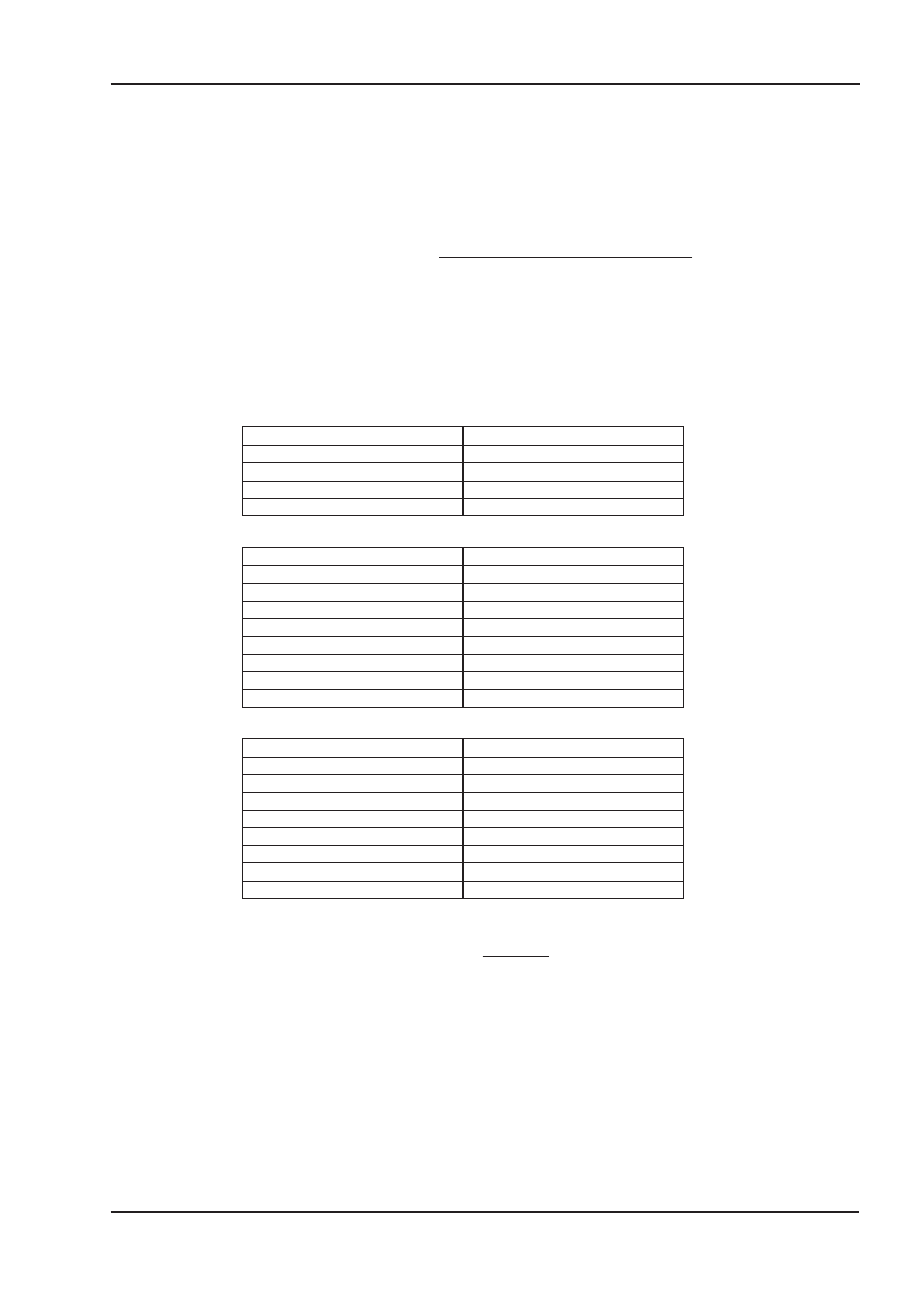
Objekt 6093h: position_factor (DS402)
Der Positionsfaktor (position_factor) konvertiert die gewünschte Position in das interne Datenformat
des AX2000/2500 (Inkremente).
Die Auflösung des Lagereglers kann mit 20 Bit/Umd oder 16 Bit/Umd betrieben werden (s. Objekt
35D1
h
und ASCII – Kommando PRBASE). Mit Hilfe des Numerators und der Vorschubkonstante
kann jede beliebige Skalierung eingestellt werden.
position_ factor
position_ encoder_ resolution gear_ r
=
´
atio
feed_ constant
l
position_encoder_resolution
Auflösung des Lagereglers 2
20
oder 2
16
l
gear_ratio
Übersetzungsverhältnis des eingesetzten Getriebes
l
feed_constant
Vorschubkonstante des Abtriebes
Index
0x6093
h
Name
position_factor
Objektcode
ARRAY
Anzahl Elemente
2
Datentyp
UNSIGNED32
Beschreibung der Subindizes:
Subindex
01
h
Kurzbeschreibung
numerator
Mode
pp
Zugriff
rw
PDO Mapping
nicht möglich
Einheit
Inkremente [inc]
Wertebereich
0..(2
32
-1)
EEPROM
nein
Defaultwert
2
20
Subindex
02
h
Kurzbeschreibung
feed_constant
Mode
pp
Zugriff
rw
PDO Mapping
nicht möglich
Einheit
—
Wertebereich
0..(2
32
-1)
EEPROM
nein
Defaultwert
10000
Beispiel:
Eine Umdrehung soll 10000 Inkrementen entsprechen. Übersetzungsverhältnis ist 1.
position_ factor
2 Inkr.
10000Inkr.
20
=
Þ
Numerator: 2
20
Vorschubkonstante: 10000
Þ
Sollwertvorgabe in [Inkr / Umd.] für das Objekt 607A
h
(target_position)
Der Numerator entspricht im Gerät dem ASCII - Parameter PGEARO, die feed_constant dem Para-
meter PGEARI.
CANopen für AX2000/2500
59
BECKHOFF
07/2007
CANopen Antriebsprofil