2 aufbau des cob-identifiers, 3 definition der verwendeten datentypen, Cob-id – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 16: Datentypen, Aufbau des cob-identifiers, Definition der verwendeten datentypen, Beckhoff
3.2
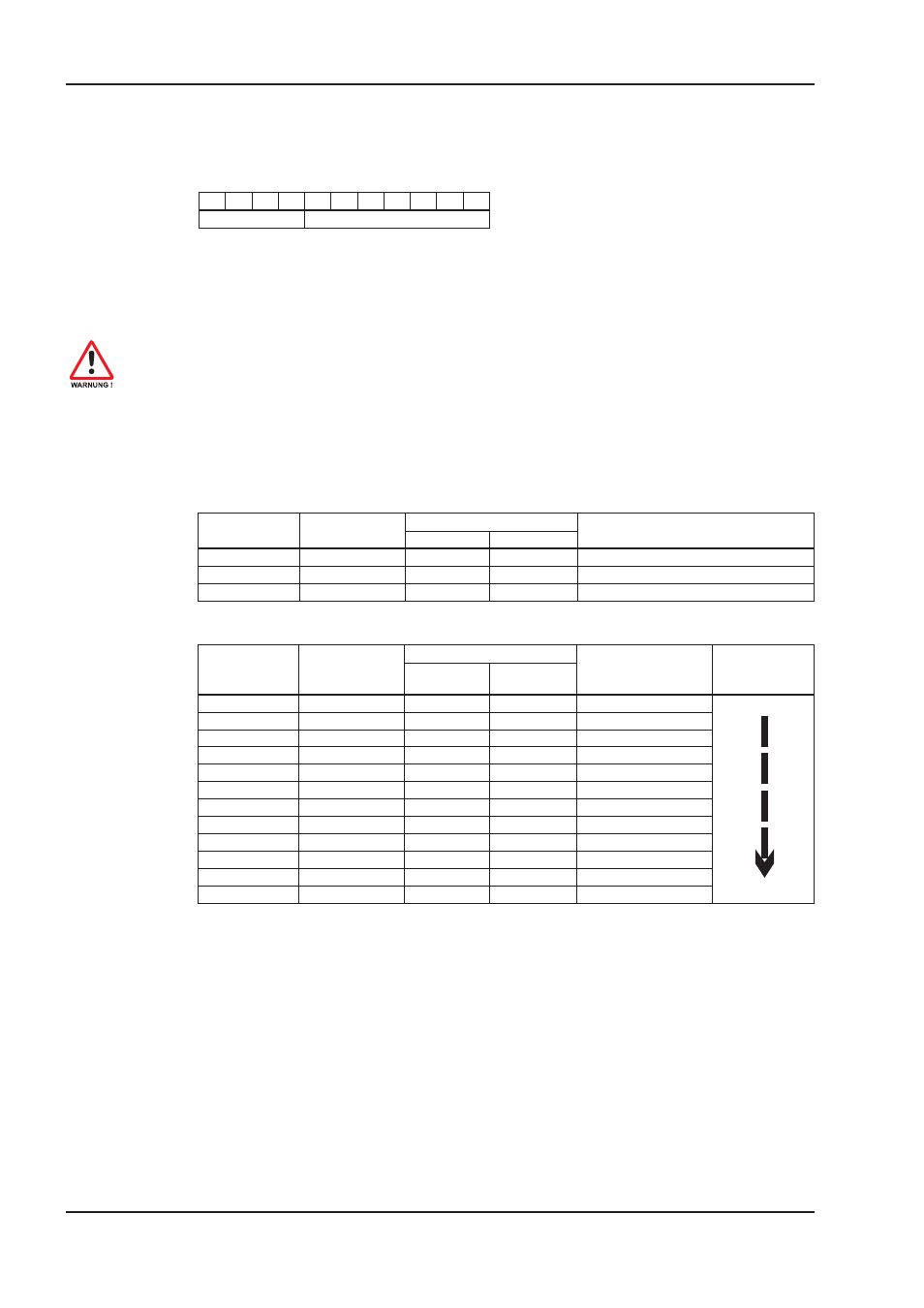
Aufbau des COB-Identifiers
Die folgende Grafik zeigt den Aufbau des COB – Identifiers (COB - ID). Der “Function Code” legt
die Bedeutung und die Priorität des jeweiligen Objekte fest.
10
9
8
7
6
5
4
3
2
1
0
Code
Module-ID
Bit 0..6
Modul ID (Stationsnummer, Bereich 1..63; wird in der Inbetriebnahmesoftware oder
am Servoverstärker eingestellt,
Þ 2.1.1)
Bit 7..10
Function Code (Nummer des im Server definierten Kommunikationsobjektes)
Achtung: Wird eine ungültige Stationsnummer eingestellt (=0 oder >63), so wird die
Modul-ID intern auf 1 gesetzt. Mit dem ASCII Objekt MDRV ist es möglich, den Adressbereich
von 63 auf 127 zu expandieren.
Die folgenden Tabellen zeigen die Default - Belegung der COB - Identifier nach dem Einschalten
des Servoverstärkers. Die Objekte, die mit einem Index (Communication Parameters at Index) ver-
sehen sind, können nach der Initialisierungsphase mit einem neuen Identifier versehen werden. Die
Indizes in Klammern sind optional.
Vordefinierte “Broadcast” Objekte (Senden an alle)
Objekt
Function code
(binary)
Resulting COB-IDs
Communication parameters
at index
Dez.
Hex.
NMT
0000
0
0
h
—
SYNC
0001
128
80
h
(1005
h
)
TIME
0010
256
100
h
—
Vordefinierte “Peer to Peer” Objekte (Senden Station zu Station)
Objekt
Function code
(binary)
Resulting COB-IDs
Communication para-
meters
at index
Piorität
Dez.
Hex.
EMERGENCY
0001
129...255
81
h
...FF
h
—
hoch
TPDO 1
0011
385...511
181
h
...1FF
h
1800
h
RPDO 1
0100
513...639
201
h
...27F
h
1400
h
TPDO 2
0101
641...767
281
h
...2FF
h
1801
h
RPDO 2
0110
769...895
301
h
...37F
h
1401
h
TPDO 3
0110
897...1023
381
h
...3FF
h
1802
h
RPDO 3
1000
1025...1151
401
h
...47F
h
1402
h
TPDO 4
1001
1153...1279
481
h
...4FF
h
1803
h
RPDO 4
1010
1281...1407
501
h
...57F
h
1403
h
SDO (tx*)
1011
1409...1535
581
h
...5FF
h
SDO (rx*)
1100
1537...1663
601
h
...67F
h
Nodeguard
1110
1793...1919
701
h
...77F
h
(100E
h
)
niedrig
*
tx = Senderichtung AX2xxx
Þ Master
rx = Senderichtung Master
Þ AX2xxx
3.3
Definition der verwendeten Datentypen
Dieses Kapitel definiert die verwendeten Datentypen. Jeder Datentyp kann mit Hilfe von
Bit -Sequenzen beschrieben werden. Diese Bit - Sequenzen werden in “Octets” (Bytes) zusammen-
gefasst. Für numerische Datentypen wird das “Little – Endian” – Format (Intel) verwendet (siehe
auch DS301 Application Layer “General Description of Data Types and Encoding Rules”).
16
CANopen für AX2000/2500
CANopen Kommunikationsprofil
07/2007
BECKHOFF