4 objekt 6094h: velocity_encoder_factor (ds402), 6094h, Objekt 6094h: velocity_encoder_factor (ds402) – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 60: Beckhoff
4.5.2.4
Objekt 6094h: velocity_encoder_factor (DS402)
Der velocity_encoder_factor konvertiert die gewünschte Drehzahl (Umd/min) oder Geschwindigkeit
(inc/s) in das interne Datenformat des AX2000/2500 (Inkremente).
Für die Berechnung des velocity_encoder_factor gilt:
velocity_ encoder_ factor
velocity_ encoder_ resolutio
=
n gear_ ratio position_ unit Fvelocity(notation_ inde
´
´
´
x)
feed_ constant velocity_ unit sec Fposition(notati
´
´
´
on_ index)
l
velocity_encoder_resolution Auflösung des Drehzahlreglers 2
20
l
gear ratio Übersetzungsverhältnis des eingesetzten Getriebes
l
position unit in Meter
l
Fposition(notation_index) in dimension_index = 1, notation_index = 0 [m]
l
feed_constant Vorschubkonstante des Abtriebes
l
velocity_unit in [m/s]
l
Fvelocity (notation_index) in dimension_index = 13, notation_index = 0 [m / s]
(s. auch Objekt 606B
h
“velocity_notation_index” und Objekt 606C
h
“velocity_dimen-
sion_index”)
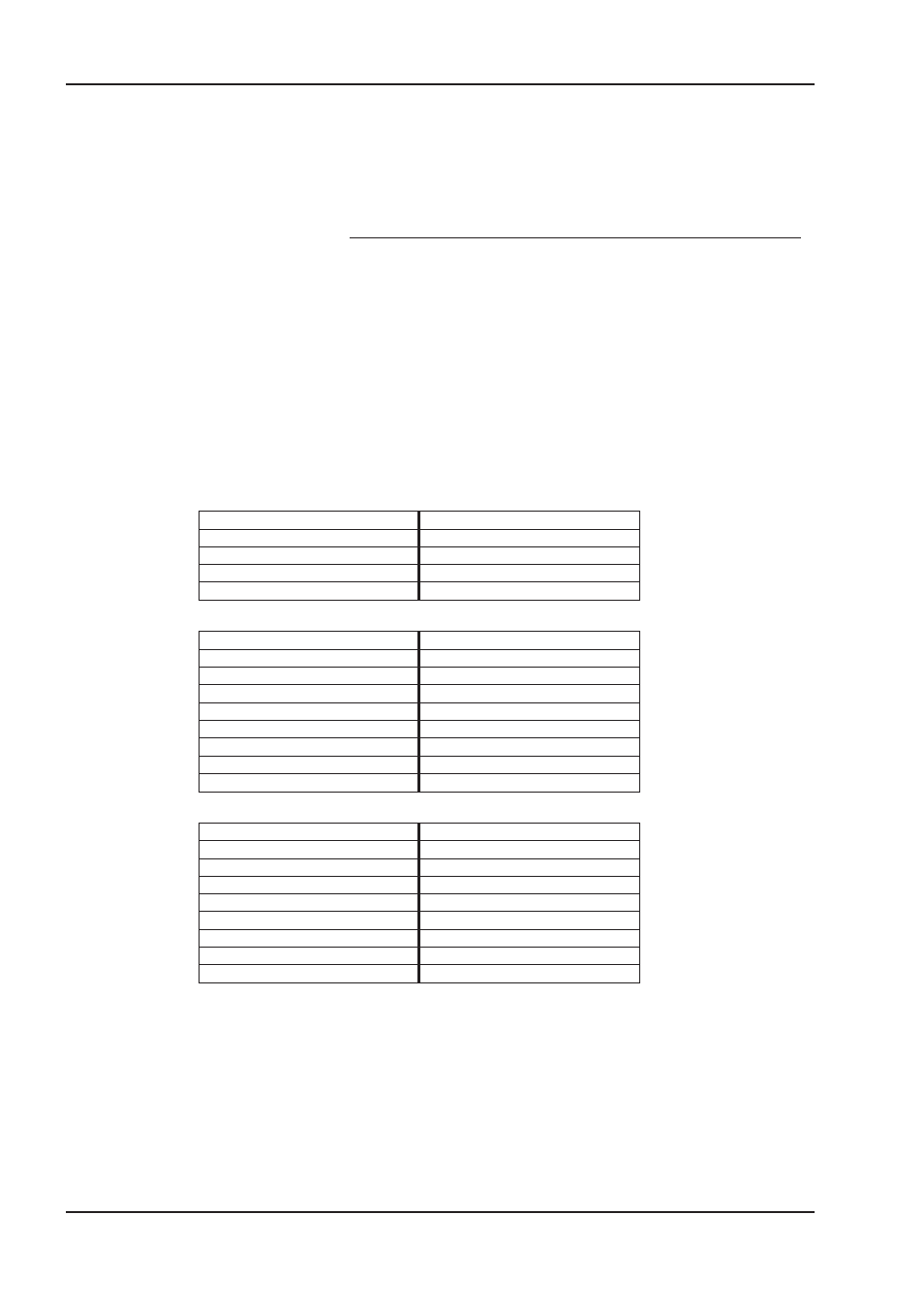
Index
0x6094
h
Name
velocity_encoder_factor
Objektcode
ARRAY
Anzahl Elemente
2
Datentyp
UNSIGNED32
Beschreibung der Subindizes:
Subindex
01
h
Kurzbeschreibung
numerator
Mode
pv
Zugriff
rw
PDO Mapping
nicht möglich
Einheit
Inkremente [inc]
Wertebereich
0..(2
32
-1)
EEPROM
nein
Defaultwert
0
Subindex
02
h
Kurzbeschreibung
divisor
Mode
pv
Zugriff
rw
PDO Mapping
nicht möglich
Einheit
Sekunde [s]
Wertebereich
0..(2
32
-1)
EEPROM
nein
Defaultwert
0
60
CANopen für AX2000/2500
CANopen Antriebsprofil
07/2007
BECKHOFF