Beckhoff – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 74
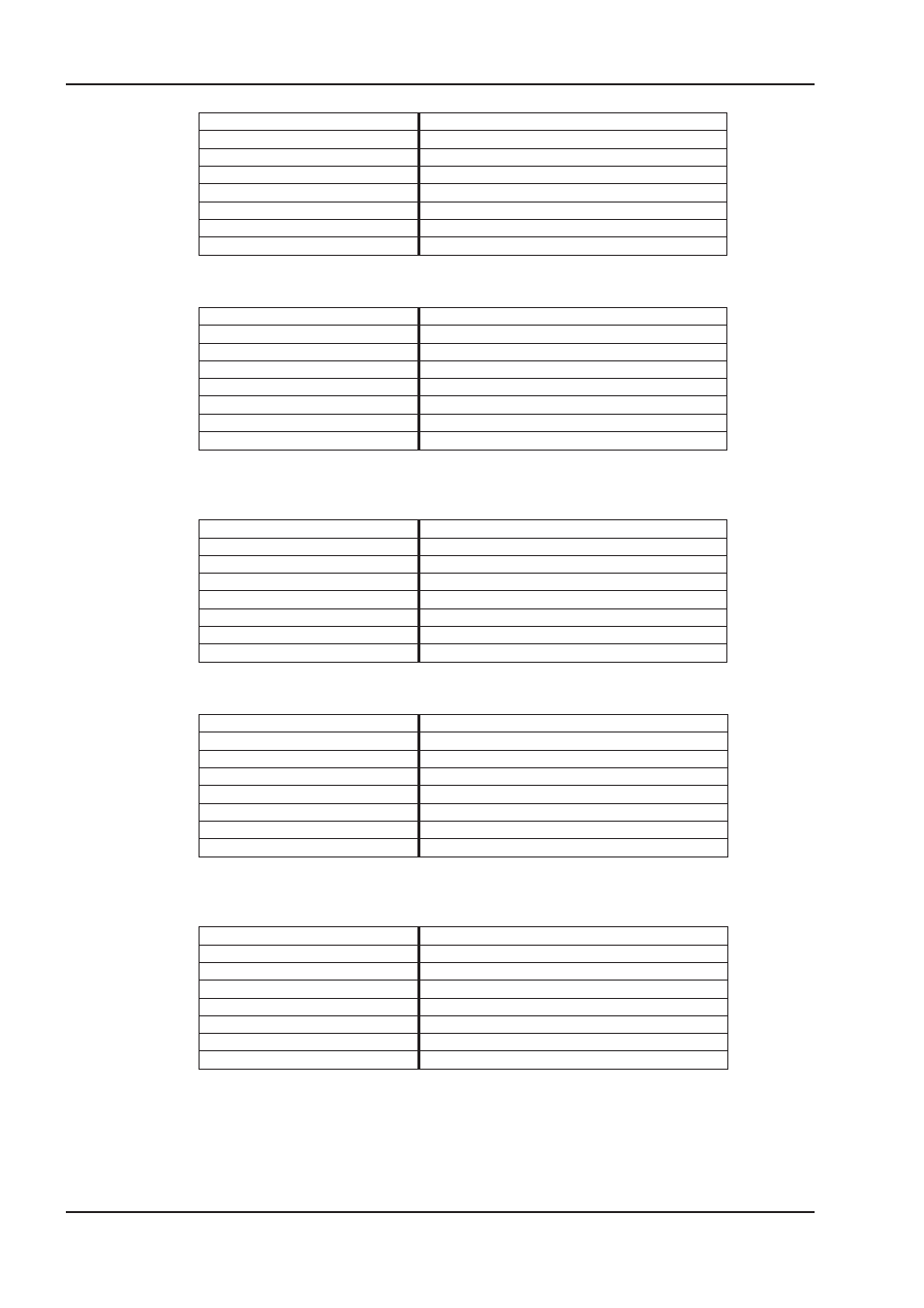
Subindex
0B
h
Kurzbeschreibung
Startverzögerung Folgefahrauftrag
Einheit
ms
Zugriff
rw
PDO mapping
nicht möglich
Datentyp
UNSIGNED16
Wertebereich
1..65535
Defaultwert
0
Über dieses Objekt wird eine Verzögerungszeit eingestellt, mit der der Folgefahrauftrag gestartet
wird. Dazu muss diese Funktion über Subindex 03
h
, Bit 7 freigegeben werden.
Subindex
0C
h
Kurzbeschreibung
Kopieren eines Fahrauftrages
Einheit
—
Zugriff
wo
PDO mapping
nicht möglich
Datentyp
2 x UNSIGNED16
Wertebereich
Jeweils 0..180, 192..255
Defaultwert
0, 0
Über dieses Objekt können Fahraufträge kopiert werden. Die Nummer, die zuerst im CAN – Tele-
gramm erscheint, beschreibt dabei den Quell – Fahrauftrag, die folgende Nummer den Ziel – Fahr-
auftrag.
Subindex
0D
h
Kurzbeschreibung
Wichtungsfaktor Geschwindigkeit
Einheit
—
Zugriff
rw
PDO mapping
nicht möglich
Datentyp
UNSIGNED16
Wertebereich
0..65535
Defaultwert
1
Über dieses Objekt wird ein Multiplikator für die im RPDO Fahrsatz angegebene Geschwindigkeit
eingestellt.
Subindex
0E
h
Kurzbeschreibung
Geschwindigkeit Direktfahrauftrag
Einheit
Inkremente / 250μs, bzw. Auflösungsabhängig
Zugriff
rw
PDO mapping
nicht möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
0
Über dieses Objekt wird die Geschwindigkeit für den Direktfahrauftrag (Fahrsatz 0) vorgegeben.
Die Fahrauftragsart bestimmt dann, ob die Geschwindigkeit inkrementell oder als SI-Einheit
ausgewertet wird.
Subindex
0F
h
Kurzbeschreibung
Sollposition CAN-Master-Slave
Einheit
Inkremente / 250μs, bzw. Auflösungsabhängig
Zugriff
rw
PDO mapping
möglich
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
0
Über dieses Objekt wird die Zielposition in Lagereglerinkrementen (2
20
Inkremente / Motorumdre-
hung) im Mode elektronisches Getriebe vorgegeben. Dieses Objekt ist im fest vorgegebenen
Rx-PDO 41 eingetragen.
74
CANopen für AX2000/2500
CANopen Antriebsprofil
07/2007
BECKHOFF