2 übergänge der zustandsmaschine, Übergänge der zustandsmaschine, Beckhoff – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 52
4.4.1.2
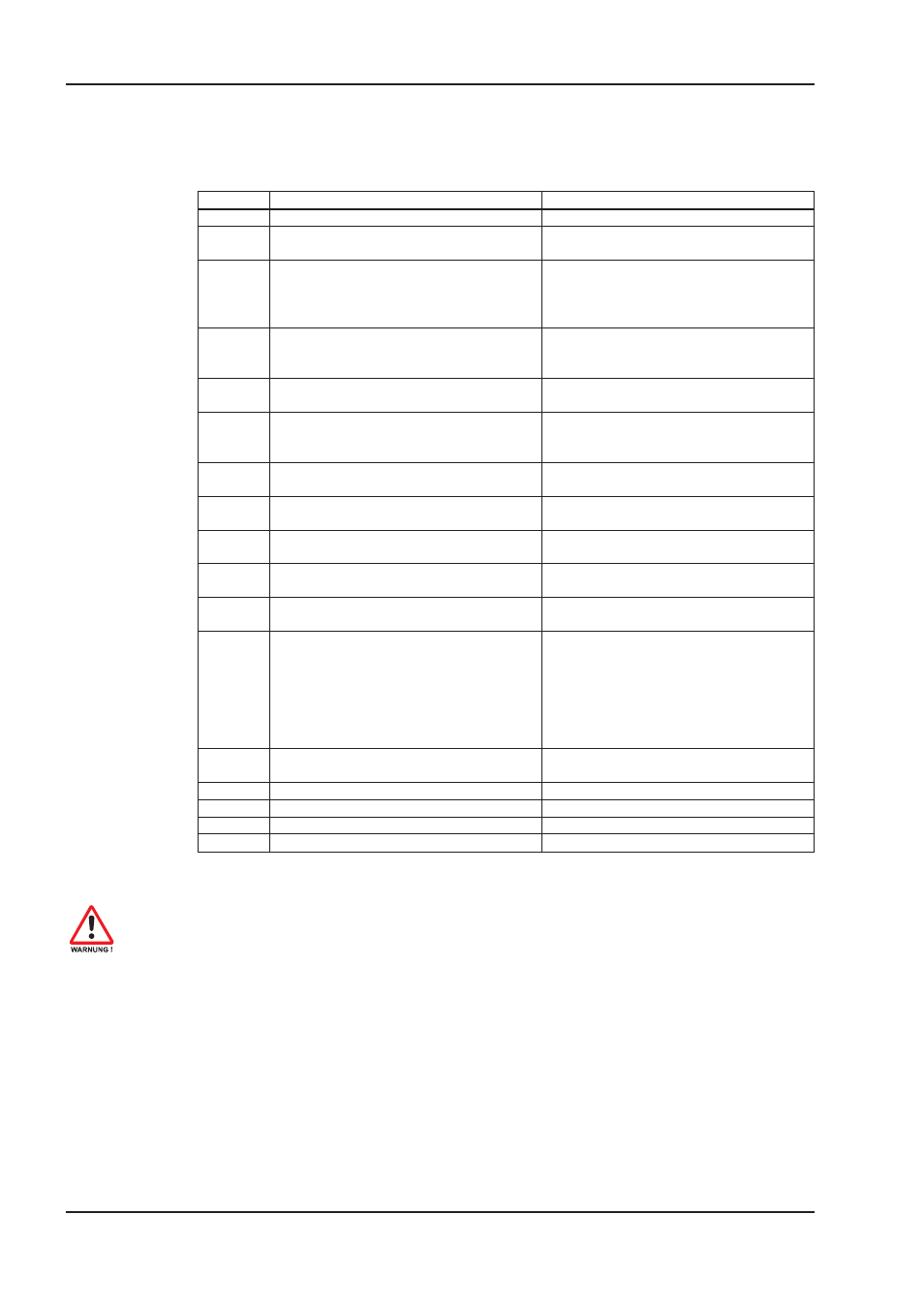
Übergänge der Zustandsmaschine
Die Zustandsübergänge werden durch interne Ereignisse (z.B. Ausschalten der Zwischenkreisspan-
nung) und durch die Flags im controlword (Bits 0,1,2,3,7) beeinflusst.
Übergang Ereignis
Aktion
0
Reset
Initialisierung
1
Initialisierung erfolgreich abgeschlossen.
AX2xxx betriebsbereit
keine
2
Bit 1 (disable Voltage) und Bit 2
(Quick Stop) im controlword gesetzt
(‘Shutdown’ command).
Zwischenkreisspannung kann anliegen.
keine
3
Bit 0 wird zusätzlich gesetzt
(‘Switch On’ command)
Endstufe wird eingeschaltet (enable), sofern
Hardware-enable anliegt (UND-Verknüpfung).
Antrieb hat Drehmoment.
4
Bit 3 wird zusätzlich gesetzt
(‘Enable Operation’ command)
Fahrfunktion in Abhängigkeit des eingestellten
Mode wird freigegeben
5
Bit 3 wird gelöscht
(‘Disable Operation’ command)
Fahrfunktion wird gesperrt. Antrieb wird mit der
relevanten Rampe (modeabhängig) gestoppt.
Aktuelle Position wird gehalten
6
Bit 0 wird gelöscht
(‘Shutdown’ command)
Endstufe wird abgeschaltet (disable).
Motor wird drehmomentfrei
7
Bit 1/2 werden gelöscht
(’Quickstop’ / ‘Disable Voltage’ command)
keine
8
Bit 0 wird gelöscht
(‘Shutdown’ command)
Endstufe wird abgeschaltet (disable)
Motor wird drehmomentfrei
9
Bit 1 wird gelöscht
(‘Disable Voltage’ command)
Endstufe wird abgeschaltet (disable)
Motor wird drehmomentfrei
10
Bit 1/2 werden gelöscht
(’Quickstop’ / ‘Disable Voltage’ command)
Fahrfunktion in Abhängigkeit des eingestellten
Mode wird freigegeben.
11
Bit 2 wird gelöscht
(’Quickstop’ command)
Antrieb wird mit der Notbremsrampe angehal-
ten. Die Endstufe bleibt “enabled“. Sollwerte
werden gelöscht (Fahrsatznummer, digitaler
Sollwert, Geschwindigkeit für Tippbetrieb oder
Referenzfahrt). Vor dem erneuten Ausführen ei-
ner Fahrfunktion muss Bit 2 wieder gesetzt wer-
den
12
Bit 1 wird gelöscht
(‘Disable Voltage’ command)
Endstufe wird abgeschaltet (disable)
Motor wird drehmomentfrei
13
Wird zur Zeit nicht unterstützt
keine
14
Wird zur Zeit nicht unterstützt
keine
15
Wird zur Zeit nicht unterstützt
keine
16
Bit 2 wird gesetzt
Fahrfunktion ist wieder freigegeben.
Achtung
wenn der Servoverstärker über das controlword / statusword bedient wird, dürfen keine
Steuerkommandos über einen anderen Kommunikationskanal (RS232, CANopen,
ASCII-Kanal, Optionskarte) gesendet werden.
52
CANopen für AX2000/2500
CANopen Antriebsprofil
07/2007
BECKHOFF