Beispiel für bedienung des profile-position modes, Anhang – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 121
6.1.6
Beispiel für Bedienung des Profile-Position Modes
Dieses Kapitel zeigt die Bedienung des Profile-Position Modes. Dazu werden die PDOs wie folgt
voreingestellt:
Erstes RPDO: PDO Steuerwort (Nr. 1)
Zweites RPDO: frei mappbares PDO 2 (Nr. 38)
Erstes TPDO: frei mappbares PDO 1 (Nr. 37)
Zweites TPDO: frei mappbares PDO 2 (Nr. 38)
Die Telegramme sehen analog zum Beispiel für PDO-Bedienung (
Þ Kap. 6.1.3) aus.
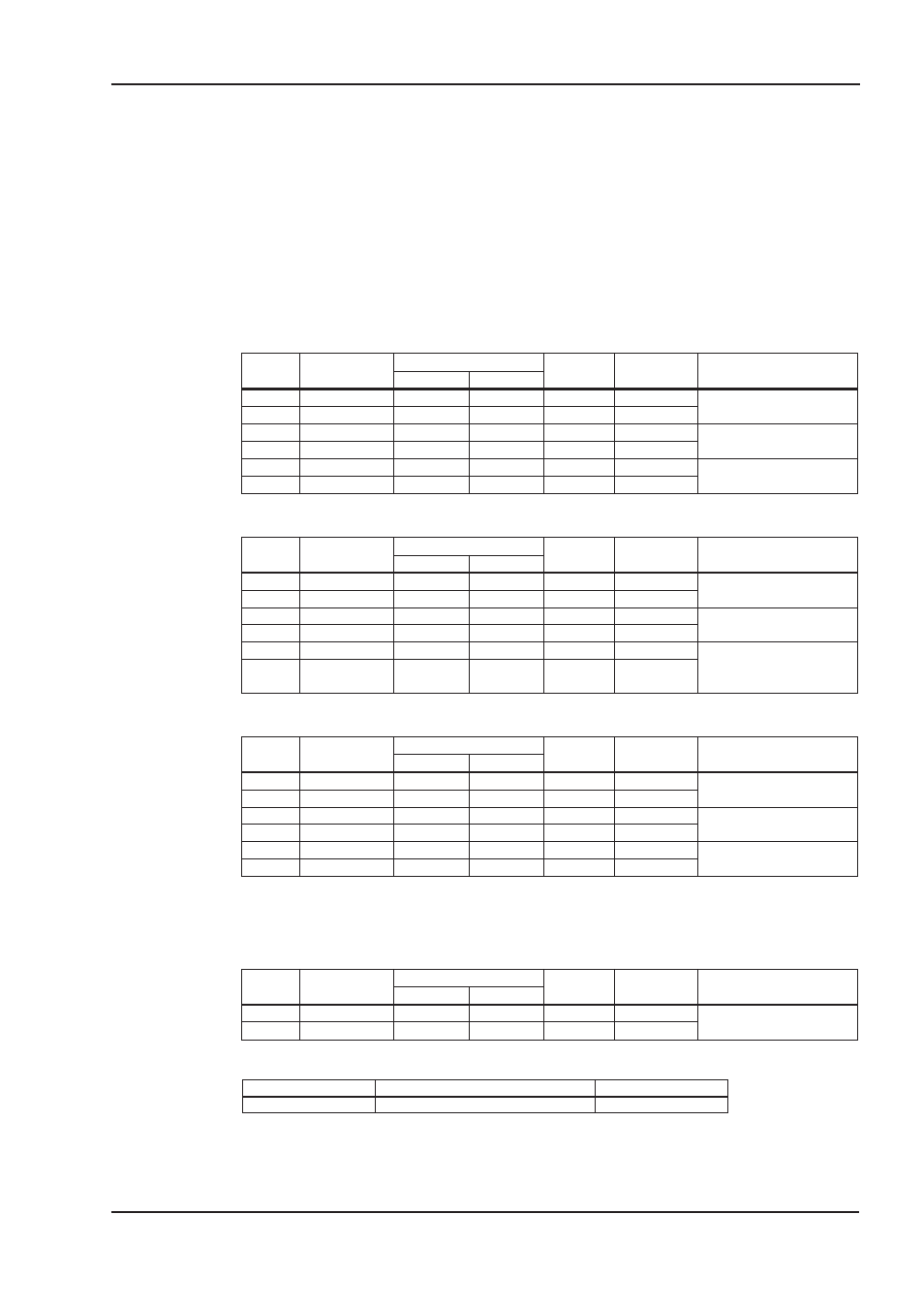
In die frei mappbaren PDOs werden Daten entsprechend der folgenden Beispieltelegramme gelegt:
1.: zweites RPDO:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
23
01
16
00
h
00 00 00 00
2. RPDO: Mapping löschen
581
60
01
16
00
h
00 00 00 00
601
23
01
16
01
h
20 00 7A 60 2. RPDO Eintrag 1: tar-
get_position
581
60
01
16
01
h
00 00 00 00
601
23
01
16
02
h
20 00 81 60
2. RPDO Eintrag 2: profi-
le_velocity
581
60
01
16
02
h
00 00 00 00
2.: erstes TPDO:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
23
00
1A
00
h
00 00 00 00
1. TPDO: Mapping löschen
581
60
00
1A
00
h
00 00 00 00
601
23
00
1A
01
h
10 00 41 60
1. TPDO Eintrag 1: Profil-
zustandswort
581
60
00
1A
01
h
00 00 00 00
601
23
00
1A
02
h
08 09 80 20
1. TPDO Eintrag 2:
TRJSTAT 3. Byte =
Herst.Status 3. Byte
581
60
00
1A
02
h
00 00 00 00
3.: zweites TPDO:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
23
01
1A
00
h
00 00 00 00
2. TPDO: Mapping löschen
581
60
01
1A
00
h
00 00 00 00
601
23
01
1A
01
h
20 00 64 60
2. TPDO Eintrag 1: positi-
on_actual_value
581
60
01
1A
01
h
00 00 00 00
601
23
01
1A
02
h
20 00 6C 60 1. TPDO Eintrag 2: veloci-
ty_actual_value
581
60
01
1A
02
h
00 00 00 00
Das erste TPDO soll ereignisgesteuert gesendet werden. Da dies dem Defaultwert der Kommunika-
tionsparameter entspricht, braucht hier nichts verändert zu werden. Das zweite TPDO soll mit
jedem SYNC vom Antrieb gesendet werden:
COB-ID
Control-Byte
Index
Subindex
Daten
Kommentar
Low-Byte
High-Byte
601
23
01
18
02
h
01 00 00 00
2. TPDO mit jedem SYNC
versenden
581
60
01
18
02
h
00 00 00 00
Nach der Festlegung der PDOs können diese mit dem NMT freigegeben werden:
COB-ID
Command specifier (CS)
Node-ID
0
1
1
CANopen für AX2000/2500
121
BECKHOFF
07/2007
Anhang