Canopen antriebsprofil – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 71
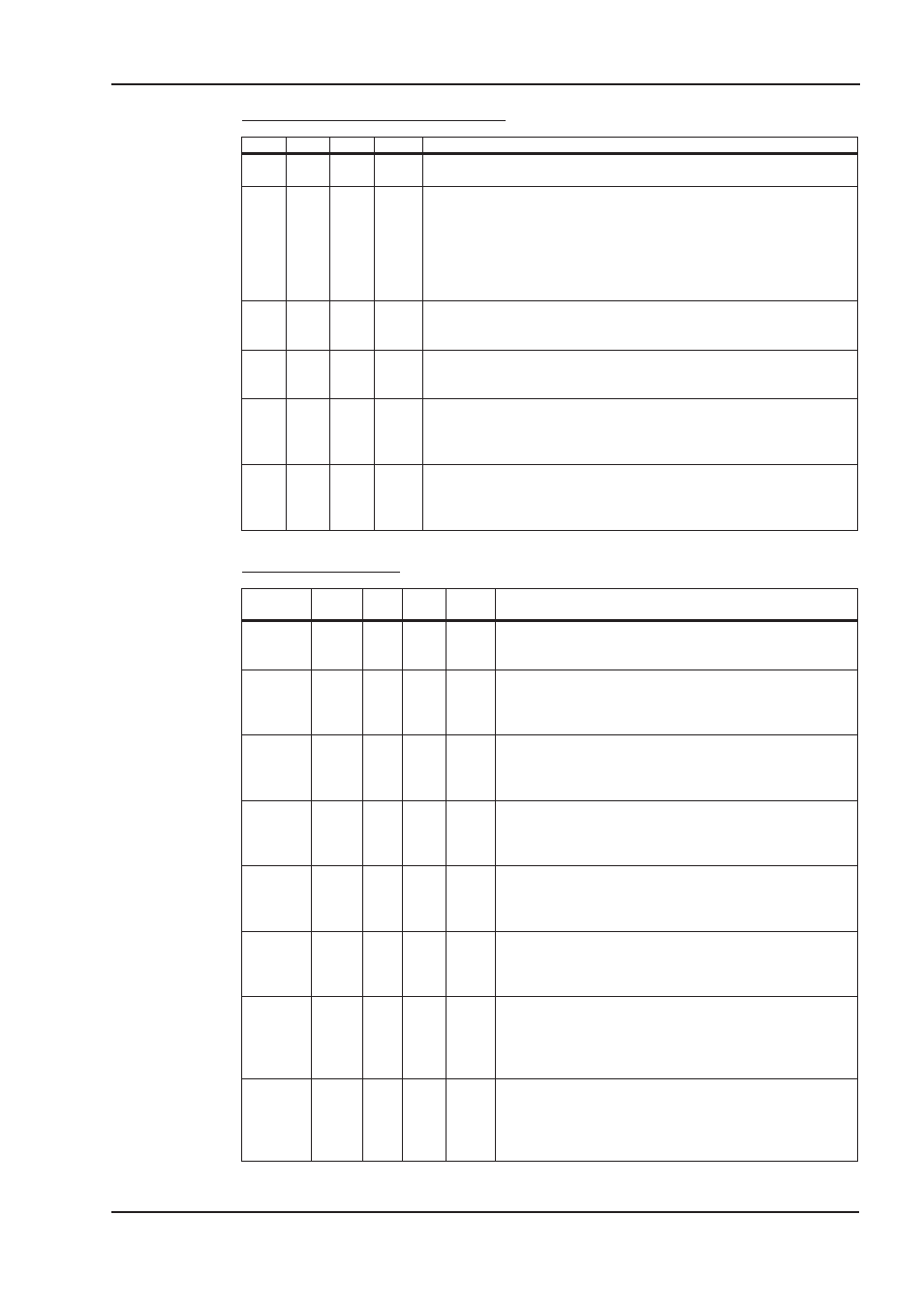
Art des relativen / absoluten Fahrsatzes
Bit 0
Bit 1
Bit 2
Bit 15 Bedeutung
0
x
x
x
Absoluter Fahrsatz, die Positionsangabe innerhalb des Fahrsatzes wird als
die Zielposition gewertet.
1
0
0
x
Relativer Fahrsatz, die Positionsangabe innerhalb des Fahrsatzes wird als
Verfahrstrecke gewertet. Die Zielposition wird abhängig vom Zustand der
IN-POSITION Meldung berechnet:
IN-POSITION=1:
neue Zielposition=letzte
Zielposition + Verfahrstrecke
IN-POSITION=0:
neue Zielposition=aktuelle
Position + Verfahrstrecke
1
1
0
x
Relativer Fahrsatz, die Positionsangabe innerhalb des Fahrsatzes wird als
Verfahrstrecke gewertet.
neue Zielposition=letzte Zielposition+Verfahrstrecke
1
0
1
x
Relativer Fahrsatz, die Positionsangabe innerhalb des Fahrsatzes wird als
Verfahrstrecke gewertet.
neue Zielposition=aktuelle Position+Verfahrstrecke
1
1
1
0
Relativer Fahrsatz, die Positionsangabe innerhalb des Fahrsatzes wird als
Verfahrstrecke gewertet.
neue Zielposition=positive Latchposition+Verfahrstrecke
(s. auch Kommando LATCH32)
1
1
1
1
Relativer Fahrsatz, die Positionsangabe innerhalb des Fahrsatzes wird als
Verfahrstrecke gewertet.
neue Zielposition=negative Latchposition+Verfahrstrecke
(s. auch Kommando LATCH32N)
Art des Folgefahrsatzes
Bit 4
NOBRAKE
Bit 5
FOL_IO
Bit 6
HI/LO
Bit 7
FTIME
Bit 8
VTARG
Bedeutung
0
0
0
0
0
Umschalten auf Folgefahrauftrag mit Abbremsen.
Der Antrieb bremst in die Zielposition des ersten Fahrsatzes.
Anschließend wird der Folgefahrsatz gestartet.
1
0
0
0
0
Fliegendes Umschalten auf den Folgeauftrag in der Zielposition.
Der Antrieb fährt mit der Zielgeschwindigkeit bis in die Zielpositi-
on des ersten Fahrsatzes. Anschließend wird bei voller Ge-
schwindigkeit auf den Folgefahrsatz umgeschaltet.
1
0
0
0
1
Fliegendes Umschalten auf den Folgeauftrag in der Zielposition.
Der Umschaltpunkt auf den Folgefahrauftrag wird so vorverlegt,
dass in der Zielposition des ersten Fahrsatzes die Zielgeschwin-
digkeit des Folgefahrsatzes bereits erreicht wird.
0
1
0
0
0
Umschalten auf Folgefahrauftrag mit Abbremsen.
Der Antrieb bremst in die Zielposition des ersten Fahrsatzes.
Der Folgefahrsatz wird gestartet, wenn der dazu definierte Ein-
gang (Funktion INxMODE=15) den Zustand LOW erreicht hat.
0
1
1
0
0
Umschalten auf Folgefahrauftrag mit Abbremsen.
Der Antrieb bremst in die Zielposition des ersten Fahrsatzes.
Der Folgefahrsatz wird gestartet, wenn der dazu definierte Ein-
gang (Funktion INxMODE=15) den Zustand HIGH erreicht hat.
0
0
0
1
0
Umschalten auf Folgefahrauftrag mit Abbremsen.
Der Antrieb bremst in die Zielposition des ersten Fahrstazes.
Der Folgefahrsatz wird gestartet, nachdem die programmierte
Verzögerungszeit (O_FT) abgelaufen ist.
0
1
0
1
0
Umschalten auf Folgefahrauftrag mit Abbremsen. Der Antrieb
bremst in die Zielposition des ersten Fahrsatzes. Der Folgefahr-
satz wird gestartet, wenn der dazu definierte Eingang (Funktiopn
INxMODE=15) den Zustand LOW erreicht hat oder nachdem die
programmierte Verzögerungszeit (O_FT) abgelaufen ist.
0
1
1
1
0
Umschalten auf Folgefahrauftrag mit Abbremsen. Der Antrieb
bremst in die Zielposition des ersten Fahrsatzes. Der Folgefahr-
satz wird gestartet, wenn der dazu definierte Eingang (Funktiopn
INxMODE=15) den Zustand HIGH erreicht hat oder nachdem
die programmierte Verzögerungszeit (O_FT) abgelaufen ist.
CANopen für AX2000/2500
71
BECKHOFF
07/2007
CANopen Antriebsprofil