11 herstellerspezifische istwerte, 1 objekt 2070h: istwerte, 2070h – BECKHOFF AX2500 CANopen communication profile Benutzerhandbuch
Seite 80: Istwerte, Herstellerspezifische istwerte, Objekt 2070h: istwerte, Beckhoff
4.11
Herstellerspezifische Istwerte
4.11.1
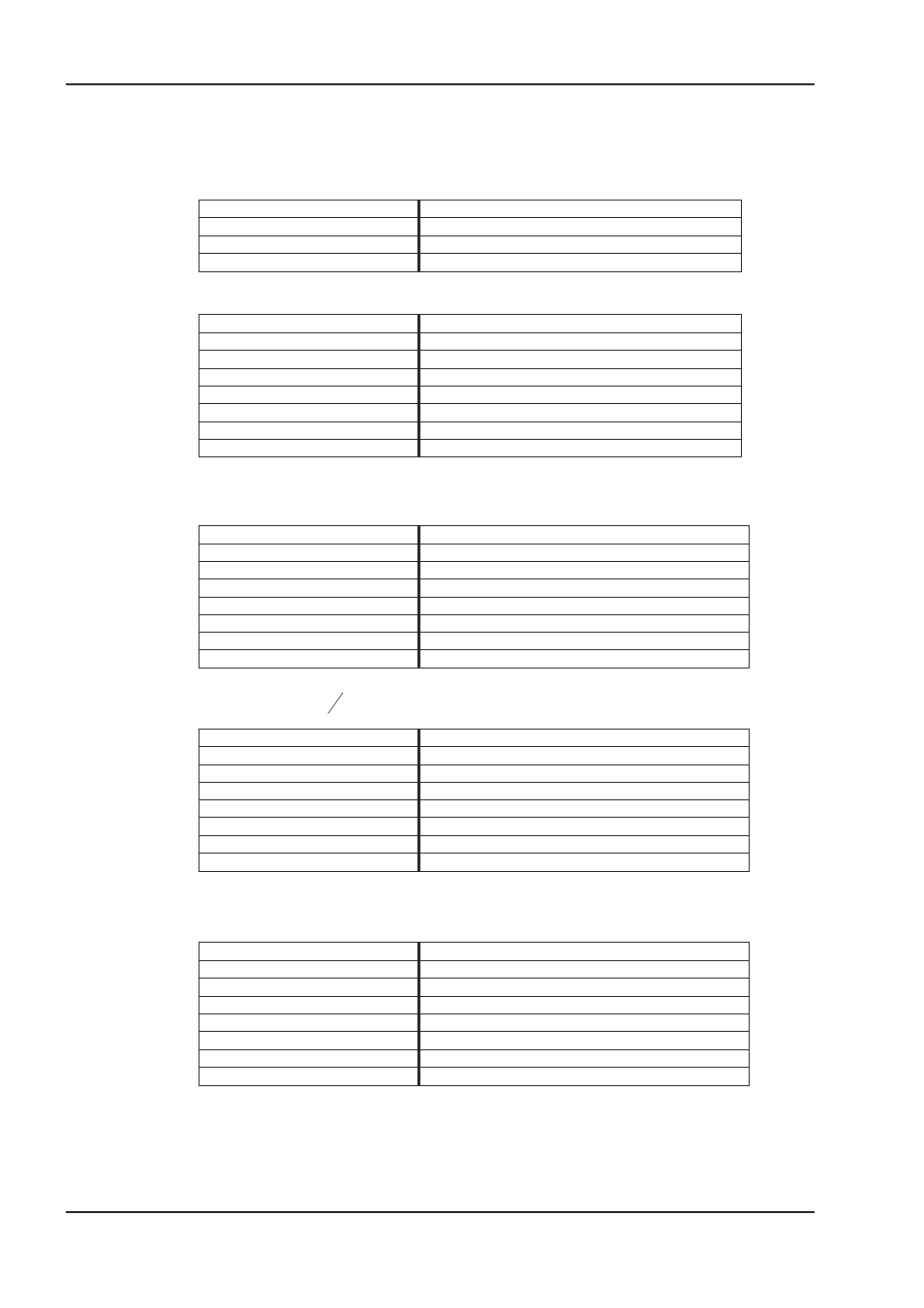
Objekt 2070h: Istwerte
Über diesen Index werden relevante Istwerte des AX2000/2500 zur Verfügung gestellt.
Index
2070
h
Kurzbeschreibung
Istwerte
Objektcode
RECORD
Anzahl Elemente
25
Subindizes:
Subindex
01
h
Kurzbeschreibung
Istlage
Einheit
—
Zugriff
ro
PDO mapping
möglich (vorgemappt auf wählbare TPDO 22, TPDO 32)
Datentyp
UNSIGNED32
Wertebereich
0..16777215
Defaultwert
0
Über diesen Index kann die Motorposition innerhalb von 16 Umdrehungen eingelesen werden. Eine
Umdrehung wird dabei mit einer Inkrementzahl von 20 Bit aufgelöst. Es gilt also:
1 Umdrehung
Þ 2
20
Inkremente
Þ1048576 Inkremente
Subindex
02
h
Kurzbeschreibung
Istdrehzahl
Einheit
min
-1
Zugriff
ro
PDO mapping
möglich (vorgemappt auf wählbare TPDO 22, TPDO 32)
Datentyp
UNSIGNED32
Wertebereich
0..1677215
Defaultwert
0
Einlesen der Motordrehzahl. Der Drehzahlistwert entspricht dabei:
n[min ]
1875
262144
eingelesener Drehzahlistwert
1
-
=
´
Subindex
03
h
Kurzbeschreibung
Inkrementeller Positionsistwert
Einheit
—
Zugriff
ro
PDO mapping
möglich (vorgemappt auf wählbares TPDO 33)
Datentyp
INTEGER32
Wertebereich
-(2
31
-1)..(2
31
-1)
Defaultwert
0
Lesen des Inkrementalwerts der Istposition. Eine Umdrehung wird dabei mit einer Inkrementzahl
von 20 Bit aufgelöst. Es gilt also:
1 Umdrehung
Þ2
20
Inkremente = 1048576 Inkremente
Subindex
04l
h
Kurzbeschreibung
Lesen des 16 Bit Positionslatch
Einheit
—
Zugriff
ro
PDO mapping
möglich
Datentyp
INTEGER16
Wertebereich
-(2
15
)..(2
15
-1)
Defaultwert
0
Lesen der gespeicherten (gelatchten) 16 Bit Position. Die Position wird in Inkrementen innerhalb
einer Umdrehung ausgegeben. Die Ausgabe wird nicht von den Getriebefaktoren oder den Factor
Groups beeinflusst.
80
CANopen für AX2000/2500
CANopen Antriebsprofil
07/2007
BECKHOFF