Carbolite nanodac Benutzerhandbuch
Seite 313
HA030554GER
Ausgabe 7 Nov 12
Seite 301
nanodac SCHREIBER/REGLER: BEDIENUNGSANLEITUNG
B2 .2 REGELARTEN (Fortsetzung)
INTEGRALANTEIL
Bei einem Proportionalregler wie im vorigen Abschnitt beschrieben muss ein Fehler zwischen Sollwert und PV
vorliegen, damit der Regler ein Ausgangssignal liefert. Der Integralwert trägt dazu bei, dass keine bleibenden
Regelfehler auftreten. Der Integralwert modifiziert die Ausgangsleistung allmählich, wenn ein Fehler zwischen
Sollwert und Messwert vorliegt. Liegt der gemessene Wert unter dem Sollwert, steigert die Integralaktion
allmählich die Ausgangsleistung, um den Fehler zu korrigieren. Liegt der gemessene Wert über dem Sollwert,
verringert die Integralaktion allmählich die Ausgangsleistung oder steigert die Kühlleistung, um den Fehler zu
korrigieren.
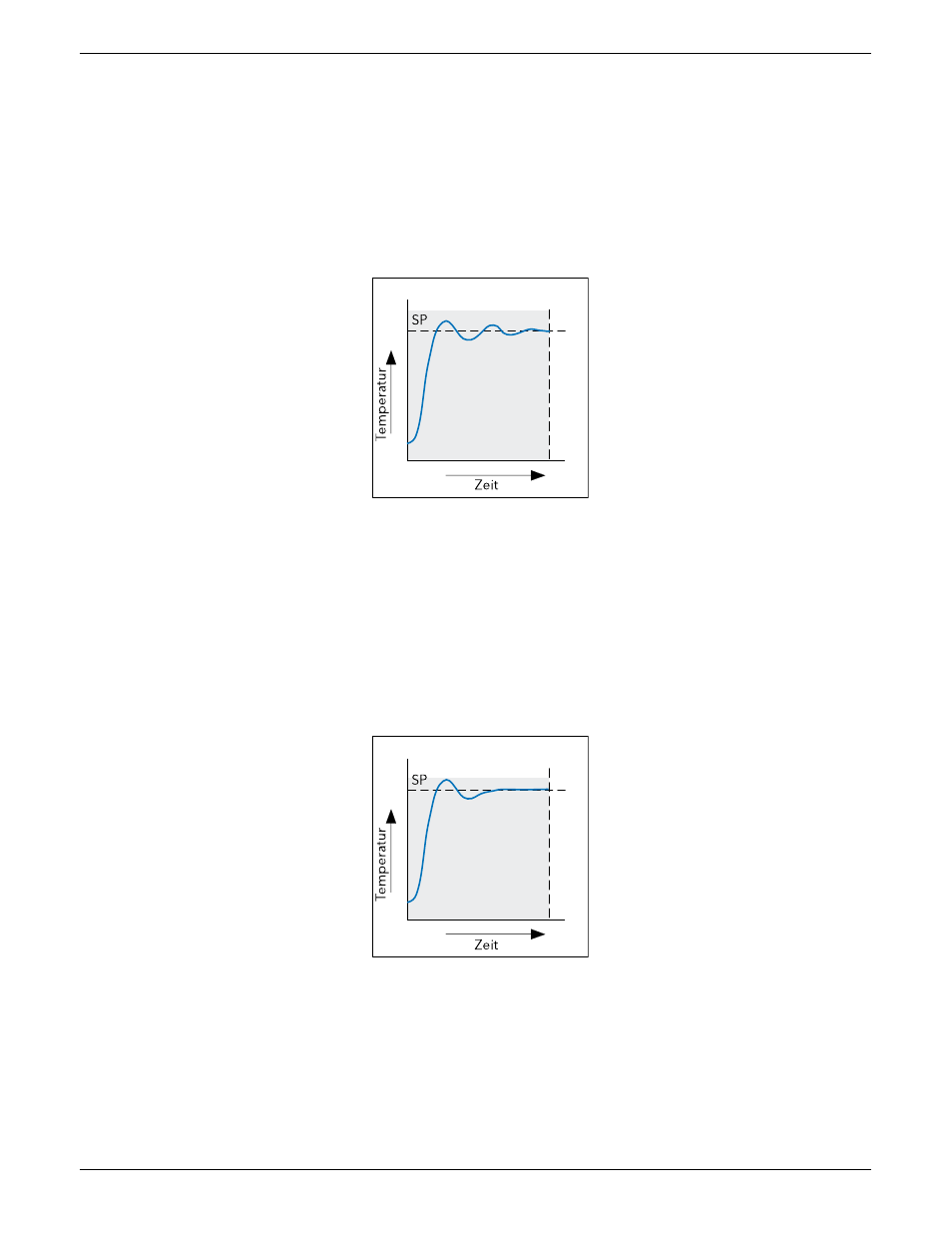
In Abbildung B2.2.2b sehen Sie eine Proportional- plus Integralaktion.
Abbildung B2.2.2b Proportional + Integralregelung
Der Integralwert wird in Sekunden eingestellt. Je länger die Integralzeitkonstante, umso langsamer wird die
Ausgangsleistung modifiziert, und umso träger die Reaktion. Haben Sie die Integralzeit zu kurz eingestellt,
führt dies zu einem Überschwingen des Prozesses und es kommt unter Umständen zu einer Oszillation. Die
Integralaktion können Sie deaktivieren, indem Sie diesen Wert auf „Aus“ stellen.
DIFFERERNTIALANTEIL
Die Differentialaktion sorgt für eine plötzliche Ausgangsänderung, die mit der Fehlergeschwindigkeit ver-
knüpft ist, unabhängig davon, ob diese vom PV allein (Differential von PV) oder auch durch eine SP Änderung
verursacht wird (Differential von Fehler). Falls der gemessene Wert rasch sinkt, sorgt die Differentialaktion für
eine große Ausgangsänderung, um die Störung möglichst zu beheben, bevor sie zu weit geht. Dies ist beson-
ders nützlich, um kleinere Störungen zu beheben.
Abbildung B2.2.2c Proportional + Integral + Differentialregelung
Die Differentialaktion wird zur Verbesserung des Regelkreisverhaltens verwendet. Es gibt jedoch Situationen, in
denen die Differentialaktion eine Instabilität verursachen kann. Arbeiten Sie z. B. mit einem stark verrauschen
PV, kann die Differentialaktion das Rauschen verstärken und starke Schwankungen des Ausgangs verursachen.
In diesen Fällen sollten Sie den Differentialanteil ausschalten und den Regelkreis erneut optimieren.
Verwenden Sie die Differentialaktion nicht, um Überschwingen in solchen Fällen zu verhindern, in denen der
Ausgang an „Ausgang Tief“ oder „Ausgang Hoch“ längere Zeit gesättigt ist, wie z. B. beim Anfahren von Pro-
zessen, da hierdurch sonst das Steady State Verhalten des Systems beeinträchtigt wird. Ein Überschwingen wird
am besten durch die Ansatzregelparameter „Cutback Hoch“ und „Cutback Tief“ unterdrückt.