Carbolite nanodac Benutzerhandbuch
Seite 314
nanodac SCHREIBER/REGLER: BEDIENUNGSANLEITUNG
Seite 302
HA030554GER
Ausgabe 7 Nov 12
B2 .2 REGELARTEN (Fortsetzung)
Stellen Sie den Differentialanteil auf „Aus“, erfolgt keine Differentialaktion.
Sie können den Differentialwert anhand von PV Änderungen oder Fehleränderungen berechnen. Falls auf
Fehlergrundlage konfiguriert, werden Änderungen am Sollwert an den Ausgang übermittelt. Bei Anwendungen
wie Ofentemperaturregelung ist es gängige Praxis, „Differential von PV“ auszuwählen, um Temperaturschocks
durch eine plötzliche Ausgangsveränderung aufgrund einer Sollwertänderung zu verhindern.
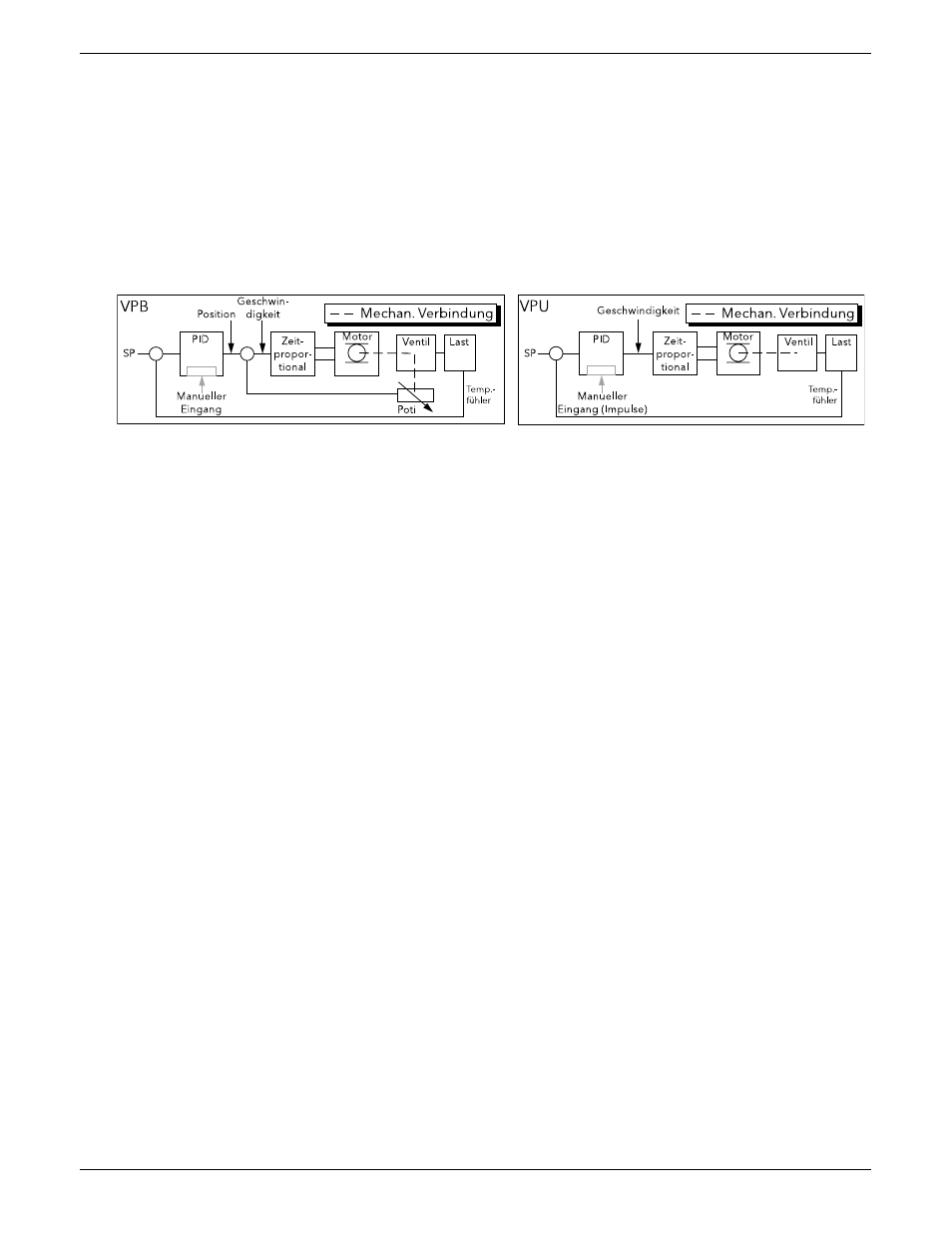
B2 .2 .3 Schrittregelung
Diese Art der Regelung wurde speziell für den Antrieb motorisierter Ventile entwickelt und kann in den Be-
triebsarten „Offen“ (VPU) oder „Geschlossen“ (VPB) eingesetzt werden. Relaisausgänge dienen zum Antrieb
des Ventilmotors.
Abbildung B2.2.3 Offene und geschlossene Schrittregelung im Vergleich
Die „offene“ Schrittregelung (VPU) benötigt zum Betrieb kein Rückführpotentiometer, da Richtung und Ge-
schwindigkeit der Bewegung des Ventils direkt kontrolliert werden, um den Fehler zwischen Sollwert (SP) und
Prozesswert (PV) zu minimieren. Die Regelung erfolgt, indem ein „Öffnen“ oder „Schließen“ Impuls übermit-
telt wird, um die Geschwindigkeit des Ventils in Reaktion auf das Regelkreisanforderungssignal zu regeln.
„Geschlossene VP“ (VPB) verwendet PID (oder eine beliebige andere Kombination der drei Werte), um die
erforderliche Ventilposition einzustellen. Ein an das Ventil angeschlossenes Rückführpotentiometer übermittelt
über ein Signal die tatsächliche Ventilposition. Damit kann der Regelkreis die Differenz zwischen der erforder-
lichen und der tatsächlichen Position dynamisch berechnen und den Reglerausgang entsprechend anpassen.
Die Regelung erfolgt, indem ein „Öffnen“ oder „Schließen“ Impuls übermittelt wird, um die Ventilposition
anzupassen.
HANDBETRIEB
„Geschlossene“ Schrittregelung regelt im Handbetrieb, da der innere Positionsregelkreis noch gegen die Poten-
tiometerrückkopplung läuft, sodass er als Positionsregelkreis dient.
Im „offenen“ Modus ist der Algorithmus ein Geschwindigkeitsmodus-Positionierer. Wählen Sie Handbetrieb,
produzieren die Mehr/Weniger Tasten für die Dauer der Tastenbetätigung +100 % bzw. -100 % Geschwindigkeit.
Im „offenen“ Modus sollten Sie die Motorlaufzeit genau einstellen, damit die Integralzeit korrekt berechnet
wird. Die Motorlaufzeit wird als (Ventil vollständig geöffnet - Ventil vollständig geschlossen) definiert. Dabei
handelt es sich nicht unbedingt um die auf dem Motor vermerkte Zeit, da, falls der Motor mit mechanischen
Stopps versehen wurde, die Ventillaufzeit unterschiedlich sein kann.
Jedes Mal, wenn das Ventil in der Endposition anstößt, wird der Algorithmus auf 0% oder 100 % gestellt, um
Abweichungen auszugleichen, die sich durch einen Verschleiß der Verbindungen oder anderer mechanischer
Teile ergeben können.
Durch diese Technik wirkt eine „offene“ Schrittregelung wie ein Positionierungsregelkreis, auch wenn dies
nicht zutrifft. Auf diese Weise ist sichergestellt, dass Kombinationen aus Heizen und Kühlen z. B. PID Heat, VPU
Cool im Handbetrieb wie erwartet funktionieren.
SCHRITTREGEL AUSGANGSVERBINDUNGEN
Einen für Schrittregelung konfigurierten Regalausgang können Sie mit dem PV Eingang eines der Relaispaare
2A2B/3A3B oder 4AC/5AC verknüpft werden, das für „Typ = Klappe öffnen“ konfiguriert wurde. Sie müssen
nur einen Relaiseingang verknüpfen, da das andere Relais aus dem Paar automatisch auf „Klappe schließen“
gestellt wird. Verknüpfen Sie z. B. den Ausgang von Regelkreis 1 Kanal 1 mit dem Relais 2A2B und konfigurie-
ren Sie „Typ“ für „Klappe öffnen“, ist „Typ“ bei Relais 3A3B automatisch „Klappe schließen“.