Mtu modultyp, Mtu drehzahlbedarf schalter, Mtu rpm anforderung für motor – Basler Electric DGC-2020 Benutzerhandbuch
Seite 633
9400200990 Rev X
DGC-2020 Modbus
™ Kommunikation
B-143
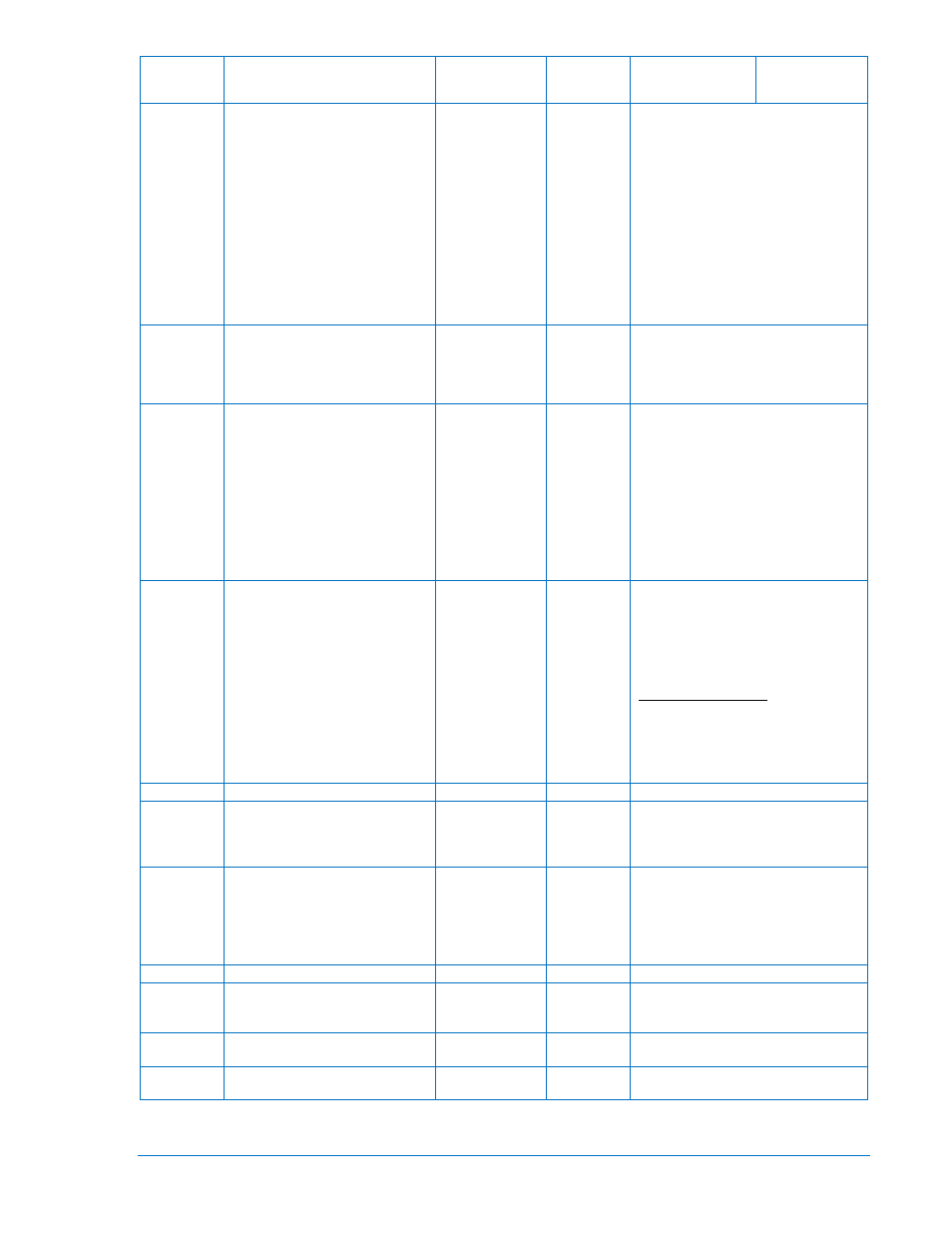
Halte-
register
Parameter
Bereich
Lesen/
Schreiben
unterstützt
Datenformat
Einheiten
40372
CAN Kommunikationsdiagnose zur
Verwendung, wenn CAN aktiviert
ist.
einzelne Bit
sind 0 oder 1
R
Bit 12 - .Motorlaufzeit
Bit 11 - Daten Fehlerstatus vorherige
aktive DTC gelöscht
Bit 10 Aktive DTC gelöscht
Bit 9 - Vorher aktive DTC
Bit 8 - Momentan aktive DTC
Bit 7 - Kühlmittelpegel
Bit 6 - Öldruck
Bit 5 - Kühlmitteltemp
Bit 4 - Motordrehzahl
Bit 3 – Can Fehlerstatus tx err passiv
Bit 2 – Can Fehlerstatus rx err passiv
Bit 1 – Can Fehlerstatus Treiber
Ruhestatus
Bit 0 – Can Fehlerstatus Bus aus
40373
Systemkonfiguration
einzelne Bit
sind 0 oder 1
R W
Bit 0 – ARBEIT
Bit 1 – AUS
Bit 2 – AUTO_ARBEIT
Bit 3 – AUTO_AUS
Bit 4 – AUTO_ANY
40374
Systemstatus
0 - 10
R
0 = ZURÜCKSETZEN
1 = BEREIT
2 = ANLASSEN
3 = RUHEN
4 = ARBEITEN
5 = ALARM
6 = VORSTART
7 = ABKÜHLEN
8 = VERBINDEN
9 = TRENNEN
10 = IMPULS
11 = ENTLASTEN
40375
Verwendet, um Wert NC, NS, NA,
und SF anzuzeigen
R
Bits 0-2: Kühlmittelpegel
Bits 3-5: Kühlmitteltemperatur
Bits 6-8: Öldruck
Bits 9-11: Motordrehzahl
Bits 12-14: Motorlaufzeit
Bit 15: NICHT VERWENDET
3-Bit Status Flag Werte:
000 für Gültige Daten
001 für Keine Kommunikation
010 für Nicht gesendet
011 für Nicht Unterstützt
100 für Senderfehler
40380-81
ZUKÜNFTIGE VERWENDUNG
40382
MTU Modultyp
1-4
R W
1 = Modultyp 201
2 = Modultyp 302
3 = Modultyp 303
4 = Modultyp 304
40383
MTU Drehzahlbedarf Schalter
0-7
R W
0 = ANALOG_CAN
1 = UP_DN_ECU
2 = UP_DN_CAN
3 = ANALOG_ECU
5 = FREQUENZ
7 = NO_CAN_DEMAND
40384
MTU RPM Anforderung für Motor
1400-2000
R W
40385
Volvo Gaspedalposition
(Begrenzung)
0-100
R W
0 = Nenndrehzahl – 120rpm;
50 = Nenndrehzahl;
100 = Nenndrehzahl + 120rpm.
40386
Volvo Motor RPM Auswahl
0-1
R W
0 = Primär ,
1 = Sekundär.
40387
J1939 Quelladresse für diese
Einheit
0-253
R W